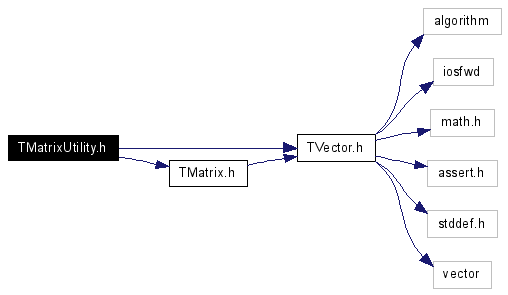
#include "TVector.h"#include "TMatrix.h"Include dependency graph for TMatrixUtility.h:
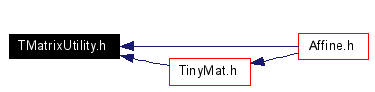
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Definition in file TMatrixUtility.h.
|
||||||||||||||||||||
|
x/y軸を指定して2×2行列を回転行列に初期化
Definition at line 25 of file TMatrixUtility.h. |
|
||||||||||||||||
|
2×2行列を回転行列に初期化
Definition at line 37 of file TMatrixUtility.h. |
|
||||||||||||||||||||||||
|
axis軸, axis++軸を指定して3×3行列を回転行列に初期化
Definition at line 62 of file TMatrixUtility.h. |
|
||||||||||||||||||||
|
3×3行列をx/y/z軸まわり回転行列に初期化
Definition at line 74 of file TMatrixUtility.h. |
|
||||||||||||||||||||
|
3×3行列を任意軸まわり回転行列に初期化 + + |u^2+(1-u^2)cos(th) uv(1-cos(th))-wsin(th) wu(1-cos(th))+vsin(th)| R = |uv(1-cos(th))+wsin(th) v^2+(1-v^2)cos(th) vw(1-cos(th))-usin(th)| |wu(1-cos(th))-vsin(th) vw(1-cos(th))+usin(th) w^2+(1-w^2)cos(th) | + + Definition at line 90 of file TMatrixUtility.h. |
|
||||||||||||||||
|
3×3行列をクォータニオンから任意軸まわり回転行列に初期化 Definition at line 109 of file TMatrixUtility.h. |
|
||||||||||
|
2×2行列を単位行列に初期化
Definition at line 129 of file TMatrixUtility.h. |
|
||||||||||
|
3×3行列を単位行列に初期化
Definition at line 137 of file TMatrixUtility.h. |
|
||||||||||
|
4×4行列を単位行列に初期化
Definition at line 146 of file TMatrixUtility.h. |
|
||||||||||
|
N×N行列を単位行列に初期化.
Definition at line 158 of file TMatrixUtility.h. |
|
||||||||||||||||
|
3×3行列をベクトルの外積計算になるように初期化(m*b == v^b).
Definition at line 167 of file TMatrixUtility.h. |
|
||||||||||||||||
|
4×4行列をある点を注視する視点行列に初期化する.
Definition at line 175 of file TMatrixUtility.h. |
|
||||||||||||||||
|
4×4行列をある点を注視する視点行列に初期化する.
Definition at line 235 of file TMatrixUtility.h. |
|
||||||||||||||||||||
|
4行ベクトルを回転をあらわすクォータニオンとして初期化 Definition at line 300 of file TMatrixUtility.h. |
|
||||||||||||||||
|
4行ベクトルを回転をあらわすクォータニオンとして初期化 Definition at line 310 of file TMatrixUtility.h. |
|
||||||||||||||||||||
|
4行ベクトルを回転をあらわすクォータニオンとして初期化 Definition at line 326 of file TMatrixUtility.h. |
|
||||||||||||||||
|
4行ベクトルを回転をあらわすクォータニオンとして初期化 Definition at line 337 of file TMatrixUtility.h. |
 1.4.1
1.4.1