|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
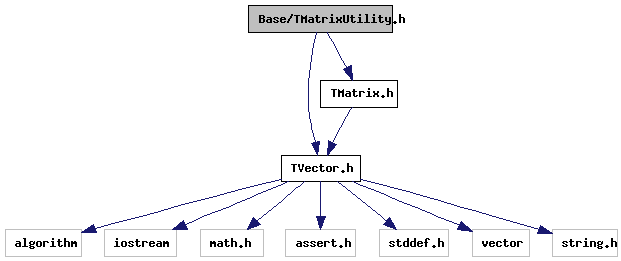
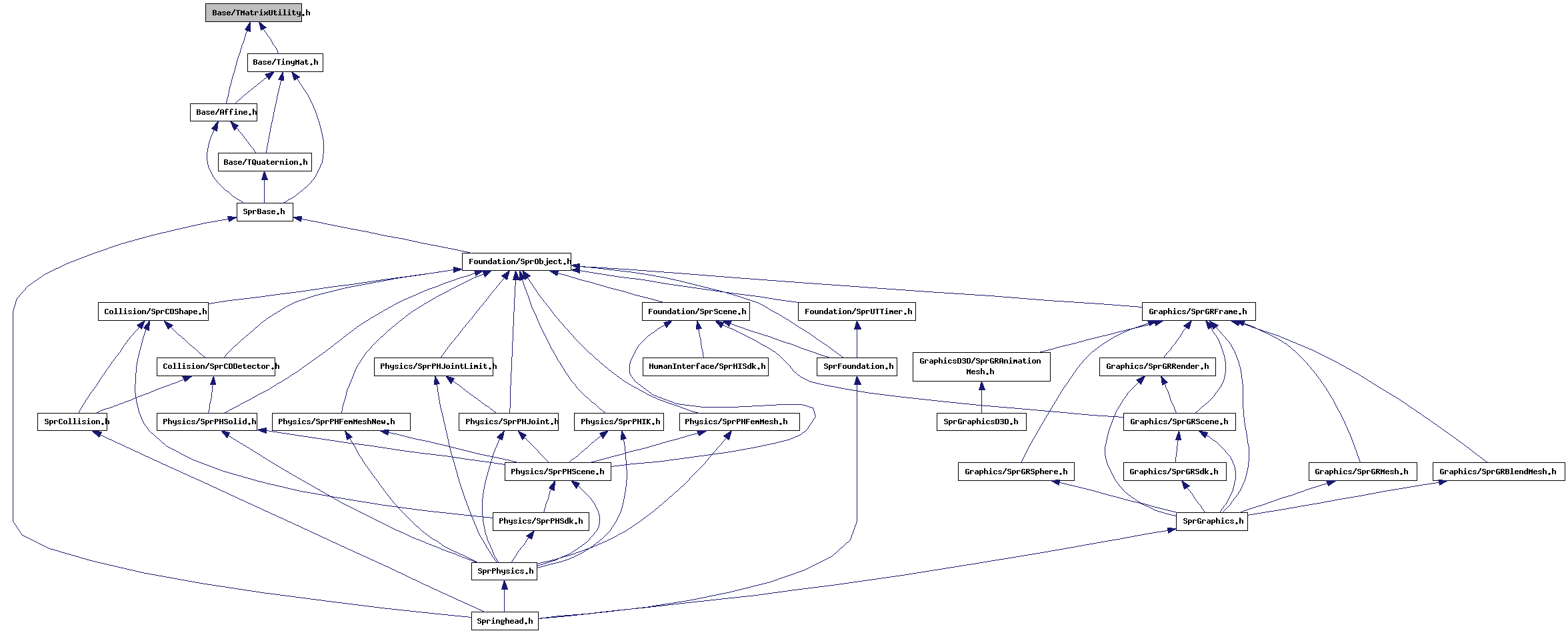
行列初期化ユーティリティー. [詳細]
関数 | |
| void | getAxisMap2D (int &x, int &y, int axis) |
| template<class MD , class AD > | |
| void | init_rot (TMatrixBase< 2, 2, MD > &m, const TVectorBase< 2, AD > &a, char axis) |
| x/y軸を指定して2×2行列を回転行列に初期化 | |
| template<class D > | |
| void | init_rot (TMatrixBase< 2, 2, D > &m, TYPENAME D::element_type th) |
| 2×2行列を回転行列に初期化 | |
| void | getAxisMap3D (int &x, int &y, int &z, int axis) |
| template<class MD , class AD , class BD > | |
| void | init_rot (TMatrixBase< 3, 3, MD > &m, const TVectorBase< 3, AD > &a, const TVectorBase< 3, BD > &b, char axis) |
| axis軸, axis++軸を指定して3×3行列を回転行列に初期化 | |
| template<class MD > | |
| void | init_rot (TMatrixBase< 3, 3, MD > &m, TYPENAME MD::element_type th, char axis) |
| 3×3行列をx/y/z軸まわり回転行列に初期化 | |
| template<class MD , class AD > | |
| void | init_rot (TMatrixBase< 3, 3, MD > &m, TYPENAME MD::element_type th, const TVectorBase< 3, AD > &axis) |
| 3×3行列を任意軸まわり回転行列に初期化 [詳細] | |
| template<class MD , class QD > | |
| void | init_rot (TMatrixBase< 3, 3, MD > &m, const TVectorBase< 4, QD > &q) |
| 3×3行列をクォータニオンから任意軸まわり回転行列に初期化 | |
| template<class D > | |
| void | init_unitize (TMatrixBase< 2, 2, D > &m) |
| 2×2行列を単位行列に初期化 | |
| template<class D > | |
| void | init_unitize (TMatrixBase< 3, 3, D > &m) |
| 3×3行列を単位行列に初期化 | |
| template<class D > | |
| void | init_unitize (TMatrixBase< 4, 4, D > &m) |
| 4×4行列を単位行列に初期化 | |
| template<class M > | |
| void | init_unitize (MatrixImp< M > &m) |
| N×N行列を単位行列に初期化 | |
| template<class MD , class D > | |
| void | init_cross (TMatrixBase< 3, 3, MD > &m, const TVectorBase< 3, D > &v) |
| 3×3行列をベクトルの外積計算になるように初期化(m*b == v^b). | |
| template<class D , class BP , class BT > | |
| void | init_look_at (TMatrixBase< 4, 4, D > &a, const TVectorBase< 3, BP > &pos, const TVectorBase< 3, BT > &diry) |
| 4×4行列をある点を注視する視点行列に初期化する. | |
| template<class D , class BZ , class BY > | |
| void | init_look_at_gl (TMatrixBase< 4, 4, D > &a, const TVectorBase< 3, BZ > &pos, const TVectorBase< 3, BY > &diry) |
| 4×4行列をある点を注視する視点行列に初期化する. | |
| template<class D , class SD , class ZD > | |
| void | init_projection_gl (TMatrixBase< 4, 4, D > &a, const TVectorBase< 3, SD > &screen_, const TVectorBase< 2, ZD > &size_, TYPENAME D::element_type front=1.0f, TYPENAME D::element_type back=10000.0f) |
| template<class D , class SD , class ZD > | |
| void | init_projection_d3d (TMatrixBase< 4, 4, D > &a, const TVectorBase< 3, SD > &screen_, const TVectorBase< 2, ZD > &size_, TYPENAME D::element_type front=1.0f, TYPENAME D::element_type back=10000.0f) |
| template<class D , class SD , class ZD > | |
| void | init_ortho_gl (TMatrixBase< 4, 4, D > &a, const TVectorBase< 3, SD > &screen_, const TVectorBase< 2, ZD > &size_, TYPENAME D::element_type front=1.0f, TYPENAME D::element_type back=10000.0f) |
| template<class QD , class T , class AD > | |
| void | init_quaternion (TVectorBase< 4, QD > &q, T angle, const TVectorBase< 3, AD > &axis) |
| 4行ベクトルを回転をあらわすクォータニオンとして初期化 | |
| template<class QD , class AD > | |
| void | init_quaternion (TVectorBase< 4, QD > &q, const TVectorBase< 3, AD > &rot) |
| 4行ベクトルを回転をあらわすクォータニオンとして初期化 | |
| template<class QD , class T > | |
| void | init_quaternion (TVectorBase< 4, QD > &q, T angle, char axis) |
| 4行ベクトルを回転をあらわすクォータニオンとして初期化 | |
| template<class QD , class MD > | |
| void | init_quaternion (TVectorBase< 4, QD > &qt, const TMatrixBase< 3, 3, MD > &m) |
| 4行ベクトルを回転をあらわすクォータニオンとして初期化 | |
 1.8.5
1.8.5