#include <PHJoint1D.h>
Inherits Spr::PHJointBase.
Inherited by Spr::PHJointHinge, and Spr::PHJointSlider.
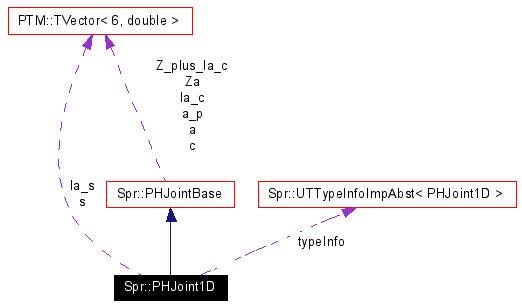
Collaboration diagram for Spr::PHJoint1D:
Definition at line 11 of file PHJoint1D.h.
|
|
gNðÇÁ
Definition at line 20 of file PHJoint1D.h. References torque. |
|
|
gNðÝè
Definition at line 21 of file PHJoint1D.h. References torque. |
|
|
gNðæ¾
Definition at line 22 of file PHJoint1D.h. References torque. |
|
|
Ößpxðæ¾
Definition at line 23 of file PHJoint1D.h. References position. |
|
|
Ö߬xðæ¾
Definition at line 24 of file PHJoint1D.h. References velocity. |
|
|
Ϫ
Reimplemented from Spr::PHJointBase. |
|
|
articulated inertia & ZA-force
Reimplemented from Spr::PHJointBase. |
|
|
±ÌWCgÌÁ¬xvZDÚ×Íî{NXÌRgðQÆD
Implements Spr::PHJointBase. |
|
|
ÖßÌ©Rx
Implements Spr::PHJointBase. Definition at line 30 of file PHJoint1D.h. |
|
|
ÖßÊuÌæ¾
Implements Spr::PHJointBase. Definition at line 32 of file PHJoint1D.h. References position. |
|
|
Ö߬xÌæ¾
Implements Spr::PHJointBase. Definition at line 34 of file PHJoint1D.h. References velocity. |
|
|
ÖßÁ¬xÌæ¾
Implements Spr::PHJointBase. Definition at line 36 of file PHJoint1D.h. References accel. |
|
|
ÖßgNÌæ¾
Implements Spr::PHJointBase. Definition at line 38 of file PHJoint1D.h. References torque. |
|
||||||||||||
|
ÖßgNÌÝè
Implements Spr::PHJointBase. Definition at line 40 of file PHJoint1D.h. References torque. |
|
||||||||||||
|
ÖßgNðÁ¦é
Implements Spr::PHJointBase. Definition at line 42 of file PHJoint1D.h. References torque. |
|
|
p¨ÈÇÌÄÝè ñÄA î{IÈóÔÊ(PHJointStateÌàe)ªLoadedâLoadStateÅZbg³ê½ãÉA ]®ÏðvZ·é½ßÌÖ Reimplemented from Spr::PHJointBase. |
|
|
óÔÌÇÝoµ
Reimplemented from Spr::PHJointBase. |
|
|
óÔÌÛ¶
Reimplemented from Spr::PHJointBase. |
|
|
NX¼Ìæ¾ÈÇÌî{@\ÌÀ
Reimplemented from Spr::PHJointBase. Reimplemented in Spr::PHJointHinge, and Spr::PHJointSlider. Definition at line 13 of file PHJoint1D.h. |
|
|
®ÍÍ(Åål)
Definition at line 13 of file PHJoint1D.h. |
|
|
®ÍÍ(Ŭl)
Definition at line 15 of file PHJoint1D.h. |
|
|
gN
Definition at line 16 of file PHJoint1D.h. Referenced by AddJointTorque(), AddTorque(), GetJointTorque(), GetTorque(), SetJointTorque(), and SetTorque(). |
|
|
ÖßÁ¬x
Definition at line 17 of file PHJoint1D.h. Referenced by GetJointAccel(). |
|
|
ÏÊ
Definition at line 18 of file PHJoint1D.h. Referenced by GetJointPosition(), and GetPosition(). |
|
|
¬x
Definition at line 19 of file PHJoint1D.h. Referenced by GetJointVelocity(), and GetVelocity(). |
|
|
spatial joint axis in Fc coord.
Definition at line 47 of file PHJoint1D.h. |
 1.4.1
1.4.1