#include <PHJointMulti.h>
Inherits Spr::PHJointBase.
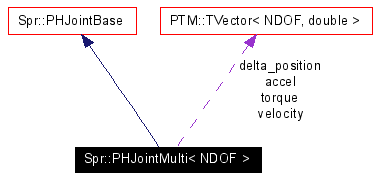
Collaboration diagram for Spr::PHJointMulti< NDOF >:
Definition at line 10 of file PHJointMulti.h.
|
||||||||||
|
gNðÇÁ
Definition at line 17 of file PHJointMulti.h. |
|
||||||||||
|
gNðÝè
Definition at line 18 of file PHJointMulti.h. |
|
|||||||||
|
gNðæ¾
Definition at line 19 of file PHJointMulti.h. |
|
|||||||||
|
Ö߬xðæ¾ Definition at line 20 of file PHJointMulti.h. |
|
|||||||||
|
ÖßÌ©Rx
Implements Spr::PHJointBase. Definition at line 22 of file PHJointMulti.h. |
|
||||||||||
|
Ö߬xÌæ¾
Implements Spr::PHJointBase. Definition at line 24 of file PHJointMulti.h. |
|
||||||||||
|
ÖßÁ¬xÌæ¾
Implements Spr::PHJointBase. Definition at line 26 of file PHJointMulti.h. |
|
||||||||||
|
ÖßgNÌæ¾
Implements Spr::PHJointBase. Definition at line 28 of file PHJointMulti.h. |
|
||||||||||||||||
|
ÖßgNÌÝè
Implements Spr::PHJointBase. Definition at line 30 of file PHJointMulti.h. |
|
||||||||||||||||
|
ÖßgNðÁ¦é
Implements Spr::PHJointBase. Definition at line 32 of file PHJointMulti.h. |
|
||||||||||
|
articulated inertia & ZA-force
Reimplemented from Spr::PHJointBase. Definition at line 34 of file PHJointMulti.h. |
|
||||||||||
|
h¶NXÌIntegrate() ªÄÑo·ÖD h¶NXÌIntegrate()ÌáF void Integrate(double dt){ PreIntegrate(dt); ±±ÅCdelta_position ©çCÖßÌp¨ðvZD PropagateState(); PHJointBase::Integrate(dt); } Definition at line 55 of file PHJointMulti.h. |
|
||||||||||
|
< ±ÌWCgÌÁ¬xvZDÚ×Íî{NXÌRgðQÆD Implements Spr::PHJointBase. Definition at line 88 of file PHJointMulti.h. |
|
|||||||||
|
p¨ÈÇÌÄÝè ñÄA î{IÈóÔÊ(PHJointStateÌàe)ªLoadedâLoadStateÅZbg³ê½ãÉA ]®ÏðvZ·é½ßÌÖ Reimplemented from Spr::PHJointBase. Definition at line 102 of file PHJointMulti.h. |
|
|||||
|
gN
Definition at line 13 of file PHJointMulti.h. |
|
|||||
|
ÖßÁ¬x
Definition at line 14 of file PHJointMulti.h. |
|
|||||
|
ÏÊÌϪ
Definition at line 15 of file PHJointMulti.h. |
|
|||||
|
¬x
Definition at line 16 of file PHJointMulti.h. |
|
|||||
|
spatial joint axis in Fc coord.
Definition at line 99 of file PHJointMulti.h. |
|
|||||
|
S' SÌÆ©Ì]n.
Definition at line 100 of file PHJointMulti.h. |
|
|||||
|
S'IaS ÌLbV .
Definition at line 101 of file PHJointMulti.h. |
 1.4.1
1.4.1