#include <HISPidarCalc6DOF.h>
Inherits Spr::HISpidarCalc3Dof.
Inherited by Spr::HISpidarG6.
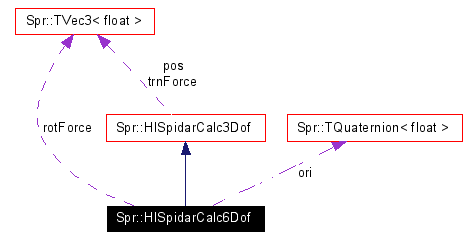
Collaboration diagram for Spr::HISpidarCalc6Dof:
Definition at line 7 of file HISPidarCalc6DOF.h.
|
||||||||||||||||
|
ú»
Reimplemented from Spr::HISpidarCalc3Dof. |
|
|
p¨îñÌXV
Reimplemented from Spr::HISpidarCalc3Dof. Reimplemented in Spr::HISpidarG6. |
|
|
ñ¦ÍÌÝèiÀiÌÝj
Reimplemented from Spr::HISpidarCalc3Dof. Reimplemented in Spr::HISpidarG6. |
|
||||||||||||
|
ñ¦ÍÌÝèiÀiEñ]Íj
Reimplemented from Spr::HISpidarCalc3Dof. Reimplemented in Spr::HISpidarG6. |
|
|
CûüPÊxNgiñ][gj
Definition at line 11 of file HISPidarCalc6DOF.h. |
|
|
ñ]Í
Definition at line 21 of file HISPidarCalc6DOF.h. |
|
|
ñ`®@ñ]ÌW
Definition at line 22 of file HISPidarCalc6DOF.h. |
 1.4.1
1.4.1