|
|
virtual void | SetStartPosition (Quaterniond sp) |
| |
|
virtual void | SetStartVelocity (Vec3d sv) |
| |
|
virtual void | SetStartAcceralation (Vec3d sa) |
| |
|
virtual void | SetStartTime (float st) |
| |
|
virtual void | SetGoalPosition (Quaterniond gp) |
| |
|
virtual void | SetGoalVelocity (Vec3d gv) |
| |
|
virtual void | SetGoalAcceralation (Vec3d ga) |
| |
|
virtual void | SetGoalTime (float gt) |
| |
|
virtual Quaterniond | GetPosition (float t) |
| |
|
virtual Vec3d | GetVelocity (float t) |
| |
|
virtual Quaterniond | GetDeltaPosition (float t) |
| |
|
virtual void | SetStart (Quaterniondsp, Vec3dsv, Vec3dsa, float st) |
| |
|
virtual void | SetGoal (Quaterniondgp, Vec3dgv, Vec3dga, float gt) |
| |
|
|
Quaterniond | startPosition |
| |
|
Quaterniond | goalPosition |
| |
|
float | startTime |
| |
|
float | goalTime |
| |
このクラスの説明は次のファイルから生成されました:
- Creature/CRMinimumJerkTrajectory.h
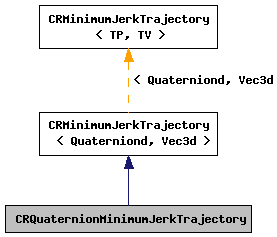
 Public メソッド inherited from CRMinimumJerkTrajectory< Quaterniond, Vec3d >
Public メソッド inherited from CRMinimumJerkTrajectory< Quaterniond, Vec3d > 1.8.5
1.8.5