|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
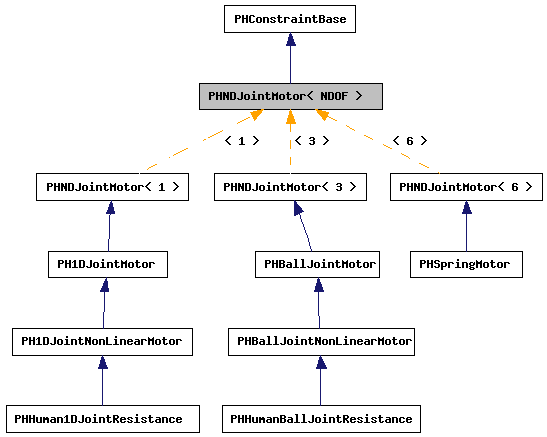
N自由度関節の関節コントローラ
#include <PHJointMotor.h>
Public 型 | |
|
typedef PTM::TVector< NDOF, double > | VecNd |
Public メソッド | |
| PHNDJointMotor () | |
| コンストラクタ | |
| virtual void | SetupAxisIndex () |
| virtual void | Setup () |
| 速度LCPの前処理 | |
| virtual bool | Iterate () |
| 速度LCP(GS)の繰り返し計算 | |
| virtual void | CompResponse (double df, int i) |
| void | CompBiasElastic () |
| 弾性変形用のCompBias | |
| void | CompBiasPlastic () |
| 塑性変形用のCompBias | |
| void | CheckYielded () |
| 降伏したかどうか | |
| virtual VecNd | GetPropV () |
| propVを計算する | |
| virtual void | GetParams (PHNDJointMotorParam< NDOF > &p) |
| パラメータを取得する | |
| virtual void | SetParams (PHNDJointMotorParam< NDOF > &p) |
| パラメータを反映する | |
 Public メソッド inherited from PHConstraintBase Public メソッド inherited from PHConstraintBase | |
| virtual void | SetupCorrection () |
| 位置LCPの前処理 | |
| virtual bool | IterateCorrection () |
| 位置LCP(GS)の繰り返し計算 | |
| virtual void | CompResponseMatrix () |
Public 変数 | |
| PHJoint * | joint |
| コントロールの対象となる関節 | |
| VecNd | fMinDt |
| VecNd | fMaxDt |
| 現在のばね部の距離(三要素モデル用) | |
| SpatialVector | newXs |
| Public 変数 inherited from PHConstraintBase | |
| SpatialVector | b |
| SpatialVector | db |
| SpatialVector | B |
| SpatialVector | A |
| SpatialVector | dA |
| SpatialVector | Ainv |
| SpatialVector | f |
| SpatialVector | F |
| SpatialVector | fnew |
| SpatialVector | Fnew |
| SpatialVector | df |
| SpatialVector | dv |
| SpatialVector | dF |
| SpatialVector | dV |
| SpatialVector | res |
| AxisIndex< 6 > | axes |
| 拘束軸管理クラス | |
| bool | dv_changed [6] |
| bool | dv_changed_next [6] |
 1.8.5
1.8.5