|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
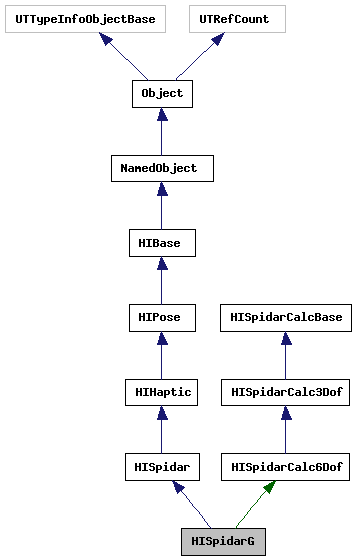
エンドエフェクタ(グリップ)が剛体で6自由度なSPIDAR.糸の本数は可変. A SPIDAR with a 6DOF solid grip. [詳細]
#include <HISpidar.h>
Public メソッド | |
| SPR_OBJECTDEF (HISpidarG) | |
| HISpidarG (const HISpidarGDesc &desc=HISpidarGDesc()) | |
| int | GetButton (size_t i) |
| ボタンの状態を取得 | |
| size_t | NButton () const |
| ボタンの数 | |
| virtual bool | Init (const void *desc) |
| デバイスの初期化(使用前に呼ぶ) | |
| virtual bool | Calibration () |
| キャリブレーション処理 | |
| Vec3f | GetPosition () |
| Quaternionf | GetOrientation () |
| virtual Vec3f | GetTorque () |
| デバイスの実際の提示トルクを返す | |
| virtual Vec3f | GetForce () |
| デバイスの実際の提示力を返す | |
| virtual void | SetForce (const Vec3f &f, const Vec3f &t=Vec3f()) |
| デバイスの目標出力とトルク出力を設定する | |
| void | SetWeight (float s=0.3f, float t=1.0f, float r=6.0f) |
| 重み付けの設定 | |
| virtual void | Update (float dt) |
| デバイスの状態を更新する. | |
 Public メソッド inherited from HISpidar Public メソッド inherited from HISpidar | |
| SPR_OBJECTDEF_ABST (HISpidar) | |
| const char * | GetSpidarType () |
| HISpidarMotorIf * | GetMotor (size_t i) |
| モータを取得 | |
| size_t | NMotor () const |
| モータの数 | |
| void | SetMinForce () |
| 最低張力を出力 | |
| void | SetLimitMinForce (float f) |
| 全てのモータに対して最小出力を設定 | |
| void | SetLimitMaxForce (float f) |
| 全てのモータに対して最大出力を設定 | |
| virtual bool | BeforeCalibration () |
| キャリブレーションの前に行う処理 | |
| HISpidar (const HISpidarDesc &desc) | |
| Public メソッド inherited from HIHaptic | |
| SPR_OBJECTDEF_ABST (HIHaptic) | |
| virtual Vec3f | GetVelocity () |
| デバイスの速度を返す | |
| virtual Vec3f | GetAngularVelocity () |
| デバイスの角速度を返す | |
| Public メソッド inherited from HIPose | |
| SPR_OBJECTDEF (HIPose) | |
| virtual Posef | GetPose () |
| virtual Affinef | GetAffine () |
| Public メソッド inherited from HIBase | |
| SPR_OBJECTDEF_ABST (HIBase) | |
| HISdkIf * | GetSdk () |
| SDKの取得 | |
| virtual bool | AfterCalibration () |
| キャリブレーションのあとに行う処理 | |
| bool | IsGood () |
| Is this human interface good for use? | |
| void | AddDeviceDependency (HIRealDeviceIf *rd) |
| Add an real device to the dependency list of real devices. [詳細] | |
| Public メソッド inherited from NamedObject | |
| NamedObject (const NamedObject &n) | |
| NamedObject & | operator= (const NamedObject &n) |
| virtual const char * | GetName () const |
| 名前の取得 | |
| virtual void | SetName (const char *n) |
| 名前の設定 | |
| virtual void | SetNameManager (NameManagerIf *s) |
| NameManagerを設定 | |
| virtual NameManagerIf * | GetNameManager () const |
| NameManagerの取得 | |
| Public メソッド inherited from Object | |
| SPR_OBJECTDEF (Object) | |
| クラス名の取得などの基本機能の実装 | |
| ObjectIf * | GetObjectIf () |
| const ObjectIf * | GetObjectIf () const |
| virtual void | Print (std::ostream &os) const |
| デバッグ用の表示 | |
| virtual void | PrintShort (std::ostream &os) const |
| virtual ObjectIf * | CreateObject (const IfInfo *info, const void *desc) |
| オブジェクトの作成 | |
| virtual size_t | NChildObject () const |
| 子オブジェクトの数 | |
| virtual ObjectIf * | GetChildObject (size_t pos) |
| 子オブジェクトの取得 | |
| virtual const ObjectIf * | GetChildObject (size_t pos) const |
| virtual bool | AddChildObject (ObjectIf *o) |
| 子オブジェクトの追加 | |
| virtual bool | DelChildObject (ObjectIf *o) |
| 子オブジェクトの削除 | |
| virtual void | Clear () |
| すべての子オブジェクトの削除とプロパティのクリア | |
| virtual void | Loaded (UTLoadContext *) |
| ファイルロード後に一度呼ばれる。ノードの設定に使う。 呼び出し順序に依存する処理がしたい場合は、UTLoadHandeler と UTLoadTask を使うと良い。 | |
| virtual void | Setup () |
| ノードの設定をするための関数 | |
| virtual bool | GetDesc (void *desc) const |
| デスクリプタの読み出し(コピー版) | |
| virtual void | SetDesc (const void *desc) |
| デスクリプタの設定 | |
| virtual const void * | GetDescAddress () const |
| デスクリプタの読み出し(参照版) | |
| virtual size_t | GetDescSize () const |
| デスクリプタのサイズ | |
| virtual bool | GetState (void *state) const |
| 状態の読み出し(コピー版) | |
| virtual const void * | GetStateAddress () const |
| 状態の読み出し(参照版) | |
| virtual void | GetStateR (char *&state) |
| 状態の再帰的な読み出し | |
| virtual void | SetState (const void *state) |
| 状態の設定 | |
| virtual void | SetStateR (const char *&state) |
| 状態の再帰的な設定 | |
| virtual bool | WriteStateR (std::ostream &fout) |
| 状態のファイルへの書き出し | |
| virtual bool | WriteState (std::string fileName) |
| virtual bool | ReadStateR (std::istream &fin) |
| 状態の読み込み | |
| virtual bool | ReadState (std::string fileName) |
| virtual size_t | GetStateSize () const |
| 状態のサイズ | |
| virtual void | ConstructState (void *m) const |
| メモリブロックを状態型に初期化 | |
| virtual void | DestructState (void *m) const |
| 状態型をメモリブロックに戻す | |
| virtual void | DumpObjectR (std::ostream &os, int level=0) const |
| メモリデバッグ用。単純にツリーのオブジェクトをファイルにダンプする。 | |
Public 変数 | |
| std::vector< DVPioIf * > | buttons |
| ボタン | |
Protected メソッド | |
| virtual void | MakeWireVec () |
| ワイヤ方向ベクトルの計算 | |
| virtual void | UpdatePos () |
| ワイヤ設置位置座標の更新 | |
| virtual void | MeasureWire () |
| ワイヤ長の計測 | |
| Protected メソッド inherited from NamedObject | |
| virtual void | PrintHeader (std::ostream &os, bool bClose) const |
| 開き括弧 | |
| Protected メソッド inherited from Object | |
| virtual void | PrintChildren (std::ostream &os) const |
| 子オブジェクトをPrint | |
| virtual void | PrintFooter (std::ostream &os) const |
| 閉じ括弧 | |
| virtual void | BeforeGetDesc () const |
| GetDesc()の前に呼ばれる | |
| virtual void | AfterSetDesc () |
| SetDesc()のあとに呼ばれる | |
| Protected メソッド inherited from HISpidarCalc6Dof | |
| void | Init (int dof, const VVector< float > &minF, const VVector< float > &maxF) |
| 初期化 | |
| void | Update () |
| 姿勢情報の更新 | |
| void | SetForce (const Vec3f &, const Vec3f &=Vec3f()) |
| 提示力の設定(並進・回転力) | |
| Vec3f | GetTorque () |
| Quaternionf | GetOrientation () |
| 角度の取得 | |
| float * | InputForTest (float, float, float, float *, float) |
| テスト用入力関数 | |
| Protected メソッド inherited from HISpidarCalc3Dof | |
| HISpidarCalc3Dof () | |
| 二次形式 並進項の係数 | |
| void | Init (int dof, const VVector< float > &minF, const VVector< float > &maxF) |
| virtual void | SetForce (const Vec3f &) |
| 提示力の設定(並進.回転力は提示しない) | |
| Vec3f | GetForce () |
| 力の取得 | |
| Vec3f | GetPosition () |
| 位置の取得 | |
| Protected メソッド inherited from HISpidarCalcBase | |
| PTM::VVector< float > & | Tension () |
| void | Init (int dof, const VVector< float > &minF, const VVector< float > &maxF) |
| 初期化 [詳細] | |
| HISpidarCalcBase () | |
| コンストラクタ | |
| virtual | ~HISpidarCalcBase () |
| デストラクタ | |
Additional Inherited Members | |
| Static Public メソッド inherited from HIBase | |
| static void | ClearDeviceDependency () |
| Clear the dependency list. | |
| Static Protected メソッド inherited from HIBase | |
| static UTRef< RealDevices > | GetRealDevices () |
| Static Protected メソッド inherited from Object | |
| static void | ConstructState (ObjectIf *o, char *&s) |
| sをoのStateとして初期化する. | |
| static void | DestructState (ObjectIf *o, char *&s) |
| sをoのStateからメモリブロックに戻す. | |
| Protected 変数 inherited from HISpidar | |
| std::string | type |
| type of SPIDAR | |
| std::vector< HISpidarMotor > | motors |
| モータ | |
| Protected 変数 inherited from HIHaptic | |
| Vec3f | vel |
| Vec3f | angVel |
| float | alpha |
| Vec3f | lastPos |
| Quaternionf | lastOri |
| Protected 変数 inherited from HIBase | |
| int | updateStep |
| bool | isGood |
| Protected 変数 inherited from NamedObject | |
| UTString | name |
| 名前 | |
| NameManager * | nameManager |
| 名前の検索や重複管理をするもの.SceneやSDKなど. | |
| Protected 変数 inherited from HISpidarCalc6Dof | |
| Quaternionf | ori |
| std::vector< Vec3f > | wireMoment |
| ワイヤ方向単位ベクトル(回転モーメント) | |
| Vec3f | rotForce |
| 回転力 | |
| float | lambda_r |
| 二次形式 回転項の係数 | |
| float | angleMax |
| 回転の最大値 | |
| Protected 変数 inherited from HISpidarCalc3Dof | |
| Vec3f | pos |
| グリップの位置 | |
| int | nRepeat |
| 繰り返し回数 | |
| std::vector< Vec3f > | wireDirection |
| ワイヤ方向単位ベクトル(並進) | |
| float | sigma |
| 係数行列の対角成分に加える | |
| Vec3f | trnForce |
| float | smooth |
| 並進力 | |
| float | lambda_t |
| 二次形式 張力の2乗項の係数 | |
| Protected 変数 inherited from HISpidarCalcBase | |
| VQuadProgram< float > | quadpr |
| 2次計画問題の計算クラス | |
| PTM::VVector< float > | measuredLength |
| 計測したワイヤ長 | |
| PTM::VVector< float > | calculatedLength |
| 前の姿勢から計算されるワイヤ長 | |
| PTM::VMatrixRow< float > | matA |
| 行列 A | |
| PTM::VMatrixRow< float > | matATA |
| A * Aの転置 | |
| PTM::VVector< float > | lengthDiff |
| Δワイヤ長 = 計測ワイヤ長 - 算出ワイヤ長. lengthDiff[i] is the measured SetLength of this time minus the computed legth of last time. | |
| PTM::VVector< float > | lengthDiffAve |
| Δワイヤ長の平均値 | |
| PTM::VVector< float > | postureDiff |
| 求めた姿勢の変化量 = A * lengthDiff | |
| Static Protected 変数 inherited from HIBase | |
| static int | deviceUpdateStep |
The number of the strings is variable.@
 1.8.5
1.8.5