#include <PHSolid.h>
Inherits Spr::SGObject.
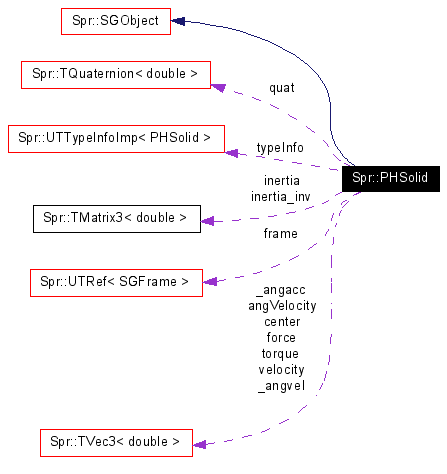
Collaboration diagram for Spr::PHSolid:
Definition at line 23 of file PHSolid.h.
|
|
\z
|
|
||||||||||||
|
[hÉgpD
Reimplemented from Spr::SGObject. |
|
|
1
Reimplemented from Spr::SGObject. |
|
|
t[ðÔ·D
Reimplemented from Spr::SGObject. |
|
|
[hI¹Ìú»
Reimplemented from Spr::SGObject. |
|
|
ðißéD
|
|
|
Íð¿ÊSÉÁ¦é
|
|
|
gNðÁ¦é
Definition at line 64 of file PHSolid.h. References torque. |
|
||||||||||||
|
Íð Êur(Worldn) ÉÁ¦é
|
|
|
ÍÆgNðNA
|
|
|
Á¦çê½Í
Definition at line 69 of file PHSolid.h. References force. |
|
|
Á¦çê½gN
Definition at line 70 of file PHSolid.h. References torque. |
|
|
ÍðÝè·é
Definition at line 71 of file PHSolid.h. References force. |
|
|
gNðZbg·é
Definition at line 72 of file PHSolid.h. References torque. |
|
|
t[Ìæ¾
Definition at line 74 of file PHSolid.h. References frame. |
|
|
t[ÌÝè frame
Definition at line 75 of file PHSolid.h. References frame. |
|
|
¿Ê
Definition at line 76 of file PHSolid.h. References mass. |
|
|
¿ÊÌt
Definition at line 77 of file PHSolid.h. References mass. |
|
|
¿ÊÌÝè
Definition at line 78 of file PHSolid.h. References mass. |
|
|
¿ÊÌtÌÝè
Definition at line 79 of file PHSolid.h. References mass. |
|
|
µ«e\
Definition at line 81 of file PHSolid.h. References inertia. |
|
|
µ«e\Ìt
|
|
|
< µ«e\ÌÝè Definition at line 83 of file PHSolid.h. References inertia. |
|
|
< µ«e\ðtÅÝè |
|
|
Ϫû®Ìæ¾
Definition at line 93 of file PHSolid.h. References integrationMode. |
|
|
Ϫû®ÌÝè
Definition at line 95 of file PHSolid.h. References integrationMode. |
|
|
dSÊuÌæ¾
|
|
|
< dSÊuÌÝè |
|
|
ü«Ìæ¾
Definition at line 106 of file PHSolid.h. References quat, and Spr::TQuaternion< ET >::to_matrix(). |
|
|
ü«ÌÝè
Definition at line 108 of file PHSolid.h. References frame, Spr::TQuaternion< ET >::from_matrix(), and quat. |
|
|
ü«Ìæ¾
Definition at line 114 of file PHSolid.h. References quat. |
|
|
ü«ÌÝè
Definition at line 116 of file PHSolid.h. References frame, quat, and Spr::TQuaternion< ET >::to_matrix(). |
|
|
¿ÊS̬xÌæ¾
Definition at line 124 of file PHSolid.h. References velocity. |
|
|
¿ÊS̬xÌÝè
Definition at line 126 of file PHSolid.h. References velocity. |
|
|
p¬xÌæ¾
Definition at line 129 of file PHSolid.h. References angVelocity. |
|
|
p¬xÌÝè
Definition at line 131 of file PHSolid.h. References angVelocity. |
|
|
[Jt[©ç©½CÌÌ¿ÊSÊuÌÝè
Definition at line 134 of file PHSolid.h. References center. |
|
|
[Jt[©ç©½CÌÌ¿ÊSÊuÌæ¾
Definition at line 136 of file PHSolid.h. References center. |
|
|
óÔÌÇÝoµ
|
|
|
óÔÌÛ¶
|
|
|
lϪW
|
|
|
¿Ê
Definition at line 27 of file PHSolid.h. Referenced by GetMass(), GetMassInv(), SetMass(), and SetMassInv(). |
|
|
µ«e\
Definition at line 28 of file PHSolid.h. Referenced by GetInertia(), and SetInertia(). |
|
|
Í (World)
Definition at line 30 of file PHSolid.h. Referenced by GetForce(), and SetForce(). |
|
|
gN (World)
Definition at line 31 of file PHSolid.h. Referenced by AddTorque(), GetTorque(), and SetTorque(). |
|
|
¬x (World)
Definition at line 32 of file PHSolid.h. Referenced by GetVelocity(), and SetVelocity(). |
|
|
p¬x (World)
Definition at line 33 of file PHSolid.h. Referenced by GetAngularVelocity(), and SetAngularVelocity(). |
|
|
¿ÊSÌÊu (Local..frameÌposturen)
Definition at line 34 of file PHSolid.h. Referenced by GetCenter(), GetCenterPosition(), SetCenter(), and SetCenterPosition(). |
|
|
ü« (World)
Definition at line 35 of file PHSolid.h. Referenced by GetOrientation(), GetRotation(), SetOrientation(), and SetRotation(). |
|
|
Êup¨ð\·t[DÊÍWorld̼ºÌt[ðwè·éD ¯¶KwÌt[ÅȯêÎÈçÈ¢D ±Ìt[ÉÍCXP[OðÁ¦ÄÍÈçÈ¢D Definition at line 40 of file PHSolid.h. Referenced by GetCenterPosition(), GetFrame(), SetCenterPosition(), SetFrame(), SetOrientation(), and SetRotation(). |
|
|
Ϫû®
Definition at line 43 of file PHSolid.h. Referenced by GetIntegrationMode(), and SetIntegrationMode(). |
|
|
NX¼Ìæ¾ÈÇÌî{@\ÌÀ
Reimplemented from Spr::SGObject. |
 1.4.1
1.4.1