|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
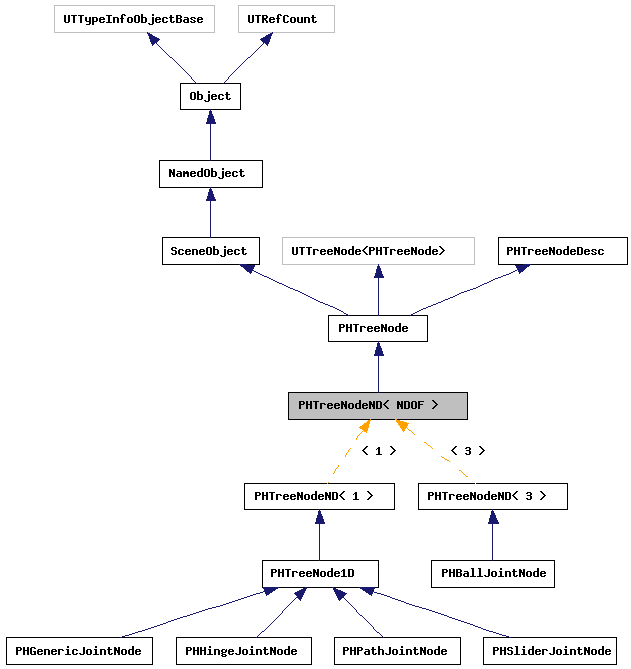
N自由度の関節の基本クラス
#include <PHTreeNode.h>
Public メソッド | |
| PHNDJoint< NDOF > * | GetJoint () |
| virtual void | ResetGear () |
| virtual void | AddToGearTrain (PHGear *gear, PHTreeNode *upper, bool isParent) |
| virtual PHTreeNode * | GetParentOfGearTrain () |
| ギアトレインを考慮した親ノード | |
| virtual PHTreeNode * | GetGearRoot () |
| ギアトレインの最上段ノード | |
| virtual void | Prepare () |
| ABA関係の関数 | |
| virtual void | InitArticulatedInertia () |
| virtual void | CompCoriolisAccel () |
| コリオリ加速度の計算 | |
| virtual void | CompSpatialTransform () |
| ノード間の座標変換の計算 | |
| virtual void | AccumulateInertia () |
| Iを親ノードのIに積み上げる | |
| virtual void | AccumulateBiasForce () |
| Zを親ノードのZに積み上げる | |
| virtual void | CompJointJacobian () |
| 個々の関節種類に対応する派生クラスが実装する仮想関数 [詳細] | |
| virtual void | CompAccel () |
| virtual void | CompResponse (PHTreeNode *src, const SpatialVector &df) |
| virtual void | CompResponseCorrection (PHTreeNode *src, const SpatialVector &dF) |
| virtual void | CompResponseMatrix () |
| virtual void | CompResponseMap () |
| virtual void | UpdateJointVelocity () |
| 関節速度の更新 | |
| virtual void | UpdateJointPosition (double dt) |
| 関節位置の更新 | |
| virtual void | ClearCorrection () |
| 位置のCorrectionのためのvelを誰もクリアしていないので追加 | |
 Public メソッド inherited from PHTreeNode Public メソッド inherited from PHTreeNode | |
| SPR_OBJECTDEF_ABST (PHTreeNode) | |
| virtual bool | AddChildObject (ObjectIf *o) |
| Objectの仮想関数 | |
| virtual size_t | NChildObject () const |
| 子オブジェクトの数 | |
| virtual ObjectIf * | GetChildObject (size_t i) |
| 子オブジェクトの取得 | |
| void | Enable (bool bEnable=true) |
| インタフェースの実装 | |
| bool | IsEnabled () |
| int | NChildren () |
| PHTreeNodeIf * | GetParentNode () |
| PHTreeNodeIf * | GetChildNode (int i) |
| SpatialMatrix | GetI () |
| SpatialVector | GetIc () |
| SpatialVector | GetC () |
| SpatialVector | GetZ () |
| SpatialMatrix | GetXcp_mat () |
| PHSolidIf * | GetSolid () |
| PHRootNodeIf * | GetRootNode () |
| bool | Includes (PHTreeNode *node) |
| 自分以下にノードnodeがあるか | |
| PHTreeNode * | FindBySolid (PHSolid *solid) |
| 自分以下のツリーでsolidを参照しているノードを探す | |
| PHTreeNode * | FindByJoint (PHJoint *joint) |
| 自分以下のツリーでjointを参照しているノードを探す | |
| void | AssignID (std::vector< PHTreeNode * > &n) |
| PHScene * | GetPHScene () |
| void | PrepareGear (PHGears &gears) |
| void | PrepareDepth () |
| void | InitArticulatedBiasForce () |
| virtual void | CompArticulatedInertia () |
| Articulated Inertiaの計算 | |
| virtual void | CompArticulatedBiasForce () |
| Articulated Bias Forceの計算 | |
| void | CompResponse (const SpatialVector &df) |
| void | CompResponseCorrection (const SpatialVector &dF) |
| double | GetResponse (PHTreeNode *src, const SpatialVector &J, const SpatialVector &df) |
| virtual void | UpdateJointVelocities (double *dt) |
| 関節の速度と関節の相対速度の更新 | |
| virtual void | UpdateSolidVelocity (double *dt) |
| 剛体の速度の更新 | |
| virtual void | UpdatePosition (double dt) |
| 剛体の位置の更新 | |
| virtual void | CompJointCoriolisAccel () |
| コリオリの加速度を計算 | |
| virtual void | CompRelativeVelocity () |
| 関節速度から剛体間相対速度を計算 | |
| virtual void | CompRelativePosition () |
| 関節位置から剛体間相対位置を計算 | |
| Public メソッド inherited from SceneObject | |
| virtual void | SetScene (SceneIf *s) |
| virtual SceneIf * | GetScene () const |
| virtual SceneObjectIf * | CloneObject () |
| Public メソッド inherited from NamedObject | |
| NamedObject (const NamedObject &n) | |
| NamedObject & | operator= (const NamedObject &n) |
| virtual const char * | GetName () const |
| 名前の取得 | |
| virtual void | SetName (const char *n) |
| 名前の設定 | |
| virtual void | SetNameManager (NameManagerIf *s) |
| NameManagerを設定 | |
| virtual NameManagerIf * | GetNameManager () const |
| NameManagerの取得 | |
| Public メソッド inherited from Object | |
| SPR_OBJECTDEF (Object) | |
| クラス名の取得などの基本機能の実装 | |
| ObjectIf * | GetObjectIf () |
| const ObjectIf * | GetObjectIf () const |
| virtual void | Print (std::ostream &os) const |
| デバッグ用の表示 | |
| virtual void | PrintShort (std::ostream &os) const |
| virtual ObjectIf * | CreateObject (const IfInfo *info, const void *desc) |
| オブジェクトの作成 | |
| virtual const ObjectIf * | GetChildObject (size_t pos) const |
| virtual bool | DelChildObject (ObjectIf *o) |
| 子オブジェクトの削除 | |
| virtual void | Clear () |
| すべての子オブジェクトの削除とプロパティのクリア | |
| virtual void | Loaded (UTLoadContext *) |
| ファイルロード後に一度呼ばれる。ノードの設定に使う。 呼び出し順序に依存する処理がしたい場合は、UTLoadHandeler と UTLoadTask を使うと良い。 | |
| virtual void | Setup () |
| ノードの設定をするための関数 | |
| virtual bool | GetDesc (void *desc) const |
| デスクリプタの読み出し(コピー版) | |
| virtual void | SetDesc (const void *desc) |
| デスクリプタの設定 | |
| virtual const void * | GetDescAddress () const |
| デスクリプタの読み出し(参照版) | |
| virtual size_t | GetDescSize () const |
| デスクリプタのサイズ | |
| virtual bool | GetState (void *state) const |
| 状態の読み出し(コピー版) | |
| virtual const void * | GetStateAddress () const |
| 状態の読み出し(参照版) | |
| virtual void | GetStateR (char *&state) |
| 状態の再帰的な読み出し | |
| virtual void | SetState (const void *state) |
| 状態の設定 | |
| virtual void | SetStateR (const char *&state) |
| 状態の再帰的な設定 | |
| virtual bool | WriteStateR (std::ostream &fout) |
| 状態のファイルへの書き出し | |
| virtual bool | WriteState (std::string fileName) |
| virtual bool | ReadStateR (std::istream &fin) |
| 状態の読み込み | |
| virtual bool | ReadState (std::string fileName) |
| virtual size_t | GetStateSize () const |
| 状態のサイズ | |
| virtual void | ConstructState (void *m) const |
| メモリブロックを状態型に初期化 | |
| virtual void | DestructState (void *m) const |
| 状態型をメモリブロックに戻す | |
| virtual void | DumpObjectR (std::ostream &os, int level=0) const |
| メモリデバッグ用。単純にツリーのオブジェクトをファイルにダンプする。 | |
Public 変数 | |
| Matrix6Nd | J |
| 関節座標から相対速度へのヤコビアン | |
| Matrix6Nd | IJ |
| Matrix6Nd | XtrIJ |
| Matrix6Nd | J_JIJinv |
| Matrix6Nd | IJ_JIJinv |
| Matrix6Nd | XtrIJ_JIJinv |
| MatrixNd | JIJ |
| MatrixNd | JIJinv |
| VecNd | JtrZplusIc |
| VecNd | dvel |
| VecNd | vel |
| 関節加速度と変化量,関節速度 | |
| PHGear * | gear |
| PHTreeNodeND< NDOF > * | gearRoot |
| ギアトレインの最上段 | |
| PHTreeNodeND< NDOF > * | gearParent |
| 親ノードと連動している場合,parentに一致 | |
| PHTreeNodeND< NDOF > * | gearUpper |
| ギアトレインの一つ上段にあるノード.兄弟ノードか親ノード | |
| double | gearRatio |
| ギアの向きを考慮したギア比 | |
| double | gearOffset |
| ギアの向きを考慮したギア位相差 | |
| double | gearRatioAbs |
| ギアトレインの累積ギア比 | |
| SpatialTransform | Xcg |
| SpatialMatrix | Xcg_mat |
| SpatialVector | sumXtrZplusIc |
| VecNd | sumJtrZplusIc |
| SpatialMatrix | sumXIX |
| MatrixNd | sumJIJ |
| MatrixNd | sumJIJinv |
| Matrix6Nd | sumXtrIJ |
| Matrix6Nd | sumXtrIJ_sumJIJinv |
| std::vector< MatrixN6d > | dZdvel_map |
| ツリー上の任意の他ノードのdZからこのノードのdvelを与える行列 | |
| Public 変数 inherited from PHTreeNode | |
| SpatialMatrix | I |
| Articulated Inertia. | |
| SpatialVector | Z |
| Articulated Bias Force. | |
| SpatialVector | c |
| コリオリ加速度 | |
| SpatialVector | cj |
| 関節速度によるコリオリ加速度 | |
| SpatialTransform | Xcp |
| SpatialTransform | Xcj |
| SpatialMatrix | Xcp_mat |
| SpatialMatrix | Xcj_mat |
| SpatialMatrix | XIX |
| SpatialMatrix | XtrIJ_JIJinv_Jtr |
| SpatialMatrix | XtrIJ_JIJinv_JtrIX |
| SpatialMatrix | J_JIJinv_Jtr |
| SpatialVector | Ic |
| SpatialVector | ZplusIc |
| SpatialVector | XtrZplusIc |
| SpatialMatrix | Tcp |
| 親ノードのdvからこのノードのdvを与える行列.転置は子ノードのdZから親ノードのdZを与える | |
| std::vector< SpatialMatrix > | dZdv_map |
| 他のノードのdZからノードのdvを与える行列 | |
| int | id |
| ノードID | |
| int | depth |
| ギアトレインを考慮したルートからの深さ | |
| PHJoint * | joint |
| 親ノードとこのノードとをつなぐ関節 | |
| PHSolid * | solid |
| このノードに関連づけられている剛体 | |
| PHRootNode * | root |
| Public 変数 inherited from PHTreeNodeDesc | |
| bool | bEnabled |
Additional Inherited Members | |
| Protected メソッド inherited from NamedObject | |
| virtual void | PrintHeader (std::ostream &os, bool bClose) const |
| 開き括弧 | |
| Protected メソッド inherited from Object | |
| virtual void | PrintChildren (std::ostream &os) const |
| 子オブジェクトをPrint | |
| virtual void | PrintFooter (std::ostream &os) const |
| 閉じ括弧 | |
| virtual void | BeforeGetDesc () const |
| GetDesc()の前に呼ばれる | |
| virtual void | AfterSetDesc () |
| SetDesc()のあとに呼ばれる | |
| Static Protected メソッド inherited from Object | |
| static void | ConstructState (ObjectIf *o, char *&s) |
| sをoのStateとして初期化する. | |
| static void | DestructState (ObjectIf *o, char *&s) |
| sをoのStateからメモリブロックに戻す. | |
| Protected 変数 inherited from NamedObject | |
| UTString | name |
| 名前 | |
| NameManager * | nameManager |
| 名前の検索や重複管理をするもの.SceneやSDKなど. | |
|
virtual |
関節ヤコビアンを計算
PHTreeNodeを再定義しています。
PHPathJointNode, PHBallJointNode, PHGenericJointNode, PHHingeJointNode, と PHSliderJointNodeで再定義されています。
 1.8.5
1.8.5