|
|
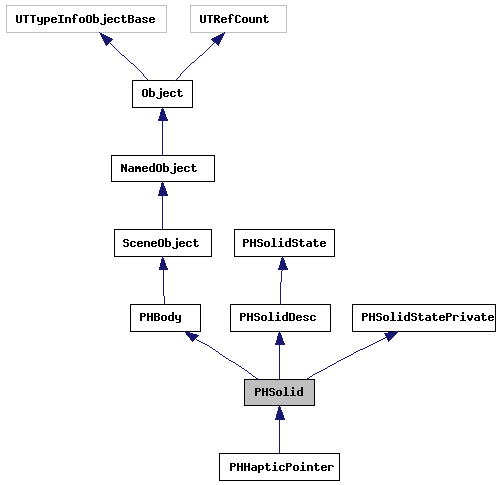
| SPR_OBJECTDEF (PHSolid) |
| |
|
| ACCESS_DESC_STATE_PRIVATE (PHSolid) |
| |
|
| PHSolid (const PHSolidDesc &desc=PHSolidDesc(), SceneIf *s=NULL) |
| |
|
virtual SceneObjectIf * | CloneObject () |
| |
|
CDShapeIf * | CreateAndAddShape (const IfInfo *info, const CDShapeDesc &desc) |
| |
|
ObjectIf * | CreateObject (const IfInfo *info, const void *desc) |
| | オブジェクトの作成
|
| |
|
bool | AddChildObject (ObjectIf *obj) |
| | 子オブジェクトの追加
|
| |
|
bool | DelChildObject (ObjectIf *obj) |
| | 子オブジェクトの削除
|
| |
|
size_t | NChildObject () const |
| | 子オブジェクトの数
|
| |
|
ObjectIf * | GetChildObject (size_t pos) |
| | 子オブジェクトの取得
|
| |
|
virtual bool | CalcBBox () |
| | 剛体と各形状のローカルBBoxを計算
|
| |
|
virtual void | CalcAABB () |
| | 剛体と各形状のワールドBBoxを計算
|
| |
|
virtual void | GetBBoxSupport (const Vec3f &dir, float &minS, float &maxS) |
| |
|
virtual void | GetBBox (Vec3d &bbmin, Vec3d &bbmax, bool world) |
| |
|
void | SetUpdated (bool set) |
| |
|
bool | IsUpdated () |
| |
|
void | Step () |
| | 時刻を進める.
|
| |
|
void | AddForce (Vec3d f) |
| | 力を質量中心に加える
|
| |
|
void | AddTorque (Vec3d t) |
| | トルクを加える
|
| |
|
void | AddForce (Vec3d f, Vec3d r) |
| | 力を 位置r(World系) に加える
|
| |
|
Vec3d | GetForce () const |
| | 拘束力以外の剛体に加わった外力。拘束力はPHConstraintから取得しなければならない。
|
| |
|
Vec3d | GetTorque () const |
| | 拘束力以外の剛体に加わった外力によるトルク。拘束トルクはPHConstraintから取得しなければならない。
|
| |
|
double | GetMass () |
| | 質量
|
| |
|
double | GetMassInv () |
| | 質量の逆数
|
| |
|
void | SetMass (double m) |
| | 質量の設定
|
| |
|
void | SetMassInv (double minv) |
| | 質量の逆数の設定
|
| |
|
Vec3d | GetCenterOfMass () |
| | ローカルフレームから見た,剛体の質量中心位置の設定
|
| |
|
void | SetCenterOfMass (const Vec3d &c) |
| | ローカルフレームから見た,剛体の質量中心位置の取得
|
| |
|
Matrix3d | GetInertia () |
| | 慣性テンソル
|
| |
|
Matrix3d | GetInertiaInv () |
| | 慣性テンソルの逆数
|
| |
|
Matrix3d | GetGlobalInertia () |
| | グローバル回転の慣性テンソル
|
| |
|
void | SetInertia (const Matrix3d &I) |
| | 慣性テンソルの設定
|
| |
|
void | SetInertiaInv (const Matrix3d &_Iinv) |
| | 慣性テンソルを逆数で設定
|
| |
|
void | CompInertia () |
| |
|
PHIntegrationMode | GetIntegrationMode () |
| | 積分方式の取得
|
| |
|
void | SetIntegrationMode (PHIntegrationMode m) |
| | 積分方式の設定
|
| |
|
Posed | GetPose () |
| | 位置と向き
|
| |
|
Vec3d | GetFramePosition () |
| | フレーム位置の取得
|
| |
|
Posed | GetPrevPose () |
| |
|
Vec3d | GetDeltaPosition () |
| |
|
Vec3d | GetDeltaPosition (const Vec3d &p) |
| |
|
Vec3d | GetPrevFramePosition () |
| |
|
Matrix3d | GetRotation () |
| |
|
Quaterniond | GetOrientation () |
| | 向きの取得
|
| |
|
void | SetPose (const Posed &p) |
| | 向きの取得
|
| |
|
void | SetFramePosition (const Vec3d &p) |
| |
|
void | SetCenterPosition (const Vec3d &p) |
| | 重心位置の設定(World)
|
| |
|
void | SetRotation (const Matrix3d &r) |
| |
|
void | SetOrientation (const Quaterniond &q) |
| | 向きの設定
|
| |
|
void | SetDv (const SpatialVector &a) |
| | 向きの設定
|
| |
| Vec3d | GetVelocity () |
| | 速度の変化量を設定する <!!>aabbReadyが必要なのかが分からない [詳細]
|
| |
|
void | SetVelocity (const Vec3d &v) |
| | 質量中心の速度の設定
|
| |
|
Vec3d | GetAngularVelocity () |
| | 角速度の取得
|
| |
|
void | SetAngularVelocity (const Vec3d &av) |
| | 角速度の設定
|
| |
| void | SetGravity (bool bOn) |
| | 質量中心の速度と角速度をまとめて取得 [詳細]
|
| |
|
void | SetDynamical (bool bOn) |
| | 物理法則に従うかどうか設定
|
| |
|
bool | IsDynamical () |
| | 物理法則に従っているかどうかを取得
|
| |
|
void | SetStationary (bool bOn) |
| |
|
bool | IsStationary () |
| |
|
void | SetFrozen (bool bOn) |
| | 速度が一定以下の時,積分を行わないように設定
|
| |
|
bool | IsFrozen () |
| | 速度が一定以下で積分を行わないかどうかを取得
|
| |
|
PHTreeNodeIf * | GetTreeNode () |
| |
 Public メソッド inherited from PHBody Public メソッド inherited from PHBody |
|
| SPR_OBJECTDEF_ABST (PHBody) |
| |
|
Vec3d | GetCenterPosition () |
| | 重心位置(回転中心)の取得(World)
|
| |
|
Vec3d | GetPointVelocity (Vec3d posW) |
| | 任意の位置での速度の取得
|
| |
|
virtual bool | InvalidateBbox () |
| |
|
int | NFrame () |
| | shapeの数。
|
| |
|
void | AddFrame (PHFrameIf *frame) |
| | shapeを、位置指定込みで追加する.
|
| |
|
PHFrameIf * | GetFrame (int i) |
| | frameで取得
|
| |
|
int | NShape () |
| | この剛体が持つ Spr::CDShape の数
|
| |
|
CDShapeIf * | GetShape (int i) |
| | この剛体が持つ i番目の SPR::CDShape の取得
|
| |
|
void | AddShape (CDShapeIf *shape) |
| | shape を この剛体が持つSpr::CDShapeのリスト の最後に追加する.
|
| |
|
void | AddShapes (CDShapeIf **shBegin, CDShapeIf **shEnd) |
| |
|
void | RemoveShape (int i) |
| | i番目のshapeを削除
|
| |
|
void | RemoveShapes (int iBegin, int iEnd) |
| | iBegin番目からiEnd-1番目までを削除
|
| |
|
void | RemoveShape (CDShapeIf *shape) |
| | この剛体が持つshapeを全て削除
|
| |
|
Posed | GetShapePose (int i) |
| | この剛体が持つ i番目の SPR::CDShape のこの剛体から見た姿勢を取得
|
| |
|
void | ClearShape () |
| | この剛体が持つ i番目の SPR::CDShape のこの剛体から見た姿勢を設定
|
| |
|
void | SetShapePose (int i, const Posed &pose) |
| | この剛体が持つSPR::CDShape を削除
|
| |
|
virtual void | SetScene (SceneIf *s) |
| |
|
virtual SceneIf * | GetScene () const |
| |
|
| NamedObject (const NamedObject &n) |
| |
|
NamedObject & | operator= (const NamedObject &n) |
| |
|
virtual const char * | GetName () const |
| | 名前の取得
|
| |
|
virtual void | SetName (const char *n) |
| | 名前の設定
|
| |
|
virtual void | SetNameManager (NameManagerIf *s) |
| | NameManagerを設定
|
| |
|
virtual NameManagerIf * | GetNameManager () const |
| | NameManagerの取得
|
| |
|
| SPR_OBJECTDEF (Object) |
| | クラス名の取得などの基本機能の実装
|
| |
|
ObjectIf * | GetObjectIf () |
| |
|
const ObjectIf * | GetObjectIf () const |
| |
|
virtual void | Print (std::ostream &os) const |
| | デバッグ用の表示
|
| |
|
virtual void | PrintShort (std::ostream &os) const |
| |
|
virtual const ObjectIf * | GetChildObject (size_t pos) const |
| |
|
virtual void | Clear () |
| | すべての子オブジェクトの削除とプロパティのクリア
|
| |
|
virtual void | Loaded (UTLoadContext *) |
| | ファイルロード後に一度呼ばれる。ノードの設定に使う。 呼び出し順序に依存する処理がしたい場合は、UTLoadHandeler と UTLoadTask を使うと良い。
|
| |
|
virtual void | Setup () |
| | ノードの設定をするための関数
|
| |
|
virtual bool | GetDesc (void *desc) const |
| | デスクリプタの読み出し(コピー版)
|
| |
|
virtual void | SetDesc (const void *desc) |
| | デスクリプタの設定
|
| |
|
virtual const void * | GetDescAddress () const |
| | デスクリプタの読み出し(参照版)
|
| |
|
virtual size_t | GetDescSize () const |
| | デスクリプタのサイズ
|
| |
|
virtual bool | GetState (void *state) const |
| | 状態の読み出し(コピー版)
|
| |
|
virtual const void * | GetStateAddress () const |
| | 状態の読み出し(参照版)
|
| |
|
virtual void | GetStateR (char *&state) |
| | 状態の再帰的な読み出し
|
| |
|
virtual void | SetState (const void *state) |
| | 状態の設定
|
| |
|
virtual void | SetStateR (const char *&state) |
| | 状態の再帰的な設定
|
| |
|
virtual bool | WriteStateR (std::ostream &fout) |
| | 状態のファイルへの書き出し
|
| |
|
virtual bool | WriteState (std::string fileName) |
| |
|
virtual bool | ReadStateR (std::istream &fin) |
| | 状態の読み込み
|
| |
|
virtual bool | ReadState (std::string fileName) |
| |
|
virtual size_t | GetStateSize () const |
| | 状態のサイズ
|
| |
|
virtual void | ConstructState (void *m) const |
| | メモリブロックを状態型に初期化
|
| |
|
virtual void | DestructState (void *m) const |
| | 状態型をメモリブロックに戻す
|
| |
|
virtual void | DumpObjectR (std::ostream &os, int level=0) const |
| | メモリデバッグ用。単純にツリーのオブジェクトをファイルにダンプする。
|
| |
|
void | Init () |
| |
 1.8.5
1.8.5