#include <HISpidar4.h>
Inherits Spr::HIForceDevice3D.
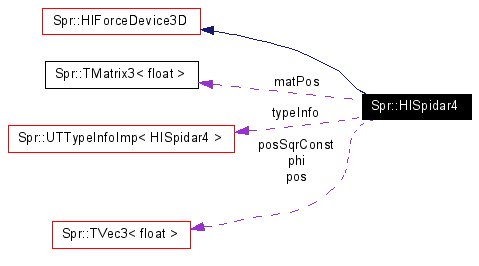
Collaboration diagram for Spr::HISpidar4:
SPIDARÌèÌÝèá
Init(dev, motPos, 0.5776, 2.924062107079e-5f, 0.5f, 20.0f);
// [^Ìæèt¯Êu. [^ª¼ûÌÉæèt¯çêÄ¢éêÍC
#define PX 0.265f // xûüÌÓÌ·³/2
#define PY 0.265f // yûüÌÓÌ·³/2
#define PZ 0.265f // zûüÌÓÌ·³/2
Vec3f motorPos[][4] = // [^Ìæèt¯Êu(Sð´_Æ·é){
{Vec3f(-PX, PY, PZ), Vec3f( PX, PY,-PZ), Vec3f(-PX,-PY,-PZ), Vec3f( PX,-PY, PZ)},
{Vec3f( PX, PY, PZ), Vec3f(-PX, PY,-PZ), Vec3f( PX,-PY,-PZ), Vec3f(-PX,-PY, PZ)}
};
// Pj
[go·½ßÌDAÌoÍd³[V/N]
// maxon: 0.008[m] / 0.0438[Nm/A] / 0.5[A/V] = 0.365296803653
// çt¸@: 0.008[m] / 0.0277[Nm/A] / 0.5[A/V] = 0.5776
sp->VoltPerNewton(0.5776f);
// PJEgÌ·³ [m/plus] Àªl: 2.924062107079e-5f
sp->LenPerPlus(2.924062107079e-5f);
// Ŭ£Í [N]
sp->MinForce(0.5f);
// Åå£Í [N]
sp->MaxForce(20.0f);
Definition at line 44 of file HISpidar4.h.
|
||||||||||||||||
|
oÍÂ\ÈÍðvZµA»ÌoÍ̾_ðvZ·é.
|
|
|
ÊuðvZ·é½ßÌsñÌú»
|
|
|
foCXÌú»(gpOÉÄÔ)
|
|
||||||||||||||||||||||||||||
|
foCXÌú»(gpOÉÄÔ)
|
|
|
Lu[VÌOÉs¤
Reimplemented from Spr::HIHapticDevice. Definition at line 83 of file HISpidar4.h. |
|
|
Lu[V
Reimplemented from Spr::HIHapticDevice. |
|
|
Åá£ÍðoÍ
|
|
||||||||||||
|
ÍÌoÍ
Reimplemented from Spr::HIForceDevice3D. Definition at line 89 of file HISpidar4.h. |
|
|
foCXÌÚWÍoÍðÝè·é
Implements Spr::HIForceDevice3D. Definition at line 90 of file HISpidar4.h. |
|
|
foCXÌóÔðXV·é.
Reimplemented from Spr::HIForceDevice6D. |
|
|
foCXÌÀÛÌñ¦ÍðÔ·
Implements Spr::HIForceDevice6D. |
|
|
foCXÌ»ÝÊuðÔ·
Implements Spr::HIForceDevice6D. Definition at line 96 of file HISpidar4.h. |
|
|
ÊuðvZ·é½ßÌè
Definition at line 51 of file HISpidar4.h. |
|
|
ÊuðvZ·é½ßÌsñ
Definition at line 53 of file HISpidar4.h. |
|
|
[^
Definition at line 59 of file HISpidar4.h. |
|
|
foCXÌ^Cv
Reimplemented from Spr::HIForceDevice3D. Definition at line 75 of file HISpidar4.h. |
 1.4.1
1.4.1