#include <HISpidarFishing.h>
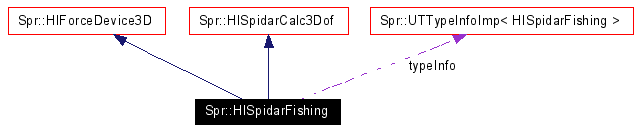
Inherits Spr::HIForceDevice3D, and Spr::HISpidarCalc3Dof.
Collaboration diagram for Spr::HISpidarFishing:
Definition at line 14 of file HISpidarFishing.h.
|
|
キャリブレーションの前に行う処理
Reimplemented from Spr::HIHapticDevice. Definition at line 29 of file HISpidarFishing.h. |
|
|
キャリブレーション
Reimplemented from Spr::HIHapticDevice. |
|
|
最低張力を出力
|
|
|
位置の取得
Implements Spr::HIForceDevice6D. Definition at line 36 of file HISpidarFishing.h. |
|
|
力の設定
Implements Spr::HIForceDevice3D. Definition at line 41 of file HISpidarFishing.h. |
|
||||||||||||
|
重み付けの設定
Definition at line 45 of file HISpidarFishing.h. |
|
|
力の取得
Implements Spr::HIForceDevice6D. Definition at line 48 of file HISpidarFishing.h. |
|
|
ボタン情報の取得
Definition at line 53 of file HISpidarFishing.h. References button. |
|
|
デバイスの状態を更新する.
Reimplemented from Spr::HIForceDevice6D. |
|
|
姿勢情報の更新
Reimplemented from Spr::HISpidarCalc3Dof. Definition at line 60 of file HISpidarFishing.h. |
|
|
ワイヤ方向ベクトルの計算
Implements Spr::HISpidarCalcBase. |
|
|
ワイヤ設置位置座標の更新
Implements Spr::HISpidarCalcBase. |
|
|
ワイヤ長の計測
Implements Spr::HISpidarCalcBase. |
|
|
モータ
Definition at line 16 of file HISpidarFishing.h. |
|
|
ボタン
Definition at line 17 of file HISpidarFishing.h. Referenced by HISpidarFishing::GetButton(). |
|
|
デバイスのタイプ
Reimplemented from Spr::HIForceDevice3D. Definition at line 20 of file HISpidarFishing.h. |
 1.4.1
1.4.1