#include <CDFramePair.h>
Spr::CDFramePairWithNormalに継承されています。
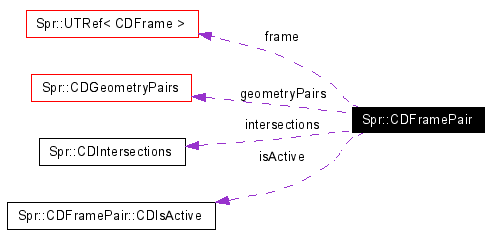
Spr::CDFramePairのコラボレーション図
フレームの所有関係 SGFrame +-子SGFrame +-CDMesh +-CDPolyhedron フレーム(SGFrame)は,複数のジオメトリ(CDGeometries)と子フレームを持つ. ジオメトリ(CDGeometry) の中には,複数のジオメトリを持つもの(CDMesh) と単純な凸形状(CDPolyhedron)がある. CDMesh は複数のConvexを持つ.
CDFramePair.h の 144 行で定義されています。
|
||||||||||||
|
フレームのセット
|
|
|
全体がアクティブかどうか
CDFramePair.h の 186 行で定義されています。 |
|
|
リスナ i がアクティブかどうか
CDFramePair.h の 188 行で定義されています。 参照先 isActive. |
|
|
クリア
Spr::PHPenaltyで再定義されています。 CDFramePair.h の 190 行で定義されています。 参照先 Spr::UTCombination< T >::clear(), frame, と geometryPairs. |
|
|
共有点を探す
|
|
|
接触しているかどうか
|
|
|
凸形状対の列挙
CDFramePair.h の 200 行で定義されています。 参照先 geometryPairs. |
|
||||||||||||
|
接触時のコールバック
CDFramePair.h の 213 行で定義されています。 参照先 intersections. |
|
|
CDConvexPairの派生クラスを使うための仕組み. このクラスを継承して,この関数をオーバーライドすることで, CDConvexPairの代わりに派生クラスを使用できる. Spr::CDFramePairWithNormal, Spr::CDFramePairWithRecord, と Spr::PHPenaltyで再定義されています。 CDFramePair.h の 219 行で定義されています。 |
|
|
CDGeometryPairの派生クラスを使うための仕組み. このクラスを継承して,この関数をオーバーライドすることで, CDGeometryPairの代わりに派生クラスを使用できる. Spr::PHPenaltyで再定義されています。 CDFramePair.h の 225 行で定義されています。 |
|
||||||||||||||||
|
フレームが持つジオメトリを列挙.
|
|
|
最後に接触した時刻
CDFramePair.h の 171 行で定義されています。 |
|
|
アクティブかどうかのフラグたち.CDCollisionEngineのリスナの数だけフラグがある.
CDFramePair.h の 173 行で定義されています。 参照元 IsActive(). |
|
|
判定対象フレーム
CDFramePair.h の 175 行で定義されています。 参照元 Clear(). |
|
|
衝突したペアだけを並べた配列
CDFramePair.h の 177 行で定義されています。 参照元 Found(). |
|
|
ジオメトリのペアの全組み合わせ
CDFramePair.h の 179 行で定義されています。 参照元 Clear(), と ConvexPairBegin(). |
 1.4.1
1.4.1