#include <PHSolid.h>
Spr::SGObjectを継承しています。
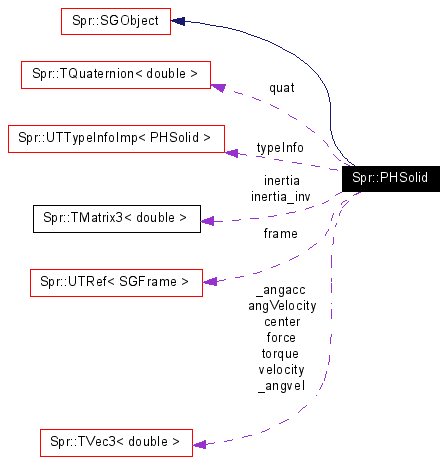
Spr::PHSolidのコラボレーション図
|
|
構築
|
|
||||||||||||
|
ロード時に使用.
Spr::SGObjectを再定義しています。 |
|
|
1
Spr::SGObjectを再定義しています。 |
|
|
フレームを返す.
Spr::SGObjectを再定義しています。 |
|
|
ロード終了時の初期化
Spr::SGObjectを再定義しています。 |
|
|
時刻を進める.
|
|
|
力を質量中心に加える
|
|
|
トルクを加える
参照先 torque. |
|
||||||||||||
|
力を 位置r(World系) に加える
|
|
|
力とトルクをクリア
|
|
|
加えられた力
参照先 force. |
|
|
加えられたトルク
参照先 torque. |
|
|
力を設定する
参照先 force. |
|
|
トルクをセットする
参照先 torque. |
|
|
フレームの取得
参照先 frame. |
|
|
フレームの設定 frame
参照先 frame. |
|
|
質量
参照先 mass. |
|
|
質量の逆数
参照先 mass. |
|
|
質量の設定
参照先 mass. |
|
|
質量の逆数の設定
参照先 mass. |
|
|
慣性テンソル
参照先 inertia. |
|
|
慣性テンソルの逆数
|
|
|
< 慣性テンソルの設定 参照先 inertia. |
|
|
< 慣性テンソルを逆数で設定 |
|
|
積分方式の取得
参照先 integrationMode. |
|
|
積分方式の設定
参照先 integrationMode. |
|
|
重心位置の取得
|
|
|
< 重心位置の設定 |
|
|
向きの取得
|
|
|
向きの設定
|
|
|
向きの取得
参照先 quat. |
|
|
向きの設定
参照先 frame, quat, と Spr::TQuaternion< ET >::to_matrix(). |
|
|
質量中心の速度の取得
参照先 velocity. |
|
|
質量中心の速度の設定
参照先 velocity. |
|
|
角速度の取得
参照先 angVelocity. |
|
|
角速度の設定
参照先 angVelocity. |
|
|
ローカルフレームから見た,剛体の質量中心位置の設定
参照先 center. |
|
|
ローカルフレームから見た,剛体の質量中心位置の取得
参照先 center. |
|
|
状態の読み出し
|
|
|
状態の保存
|
|
|
数値積分係数
|
|
|
質量
参照元 GetMass(), GetMassInv(), SetMass(), と SetMassInv(). |
|
|
慣性テンソル
参照元 GetInertia(), と SetInertia(). |
|
|
力 (World)
参照元 GetForce(), と SetForce(). |
|
|
トルク (World)
参照元 AddTorque(), GetTorque(), と SetTorque(). |
|
|
速度 (World)
参照元 GetVelocity(), と SetVelocity(). |
|
|
角速度 (World)
|
|
|
質量中心の位置 (Local..frameのposture系)
参照元 GetCenter(), GetCenterPosition(), SetCenter(), と SetCenterPosition(). |
|
|
向き (World)
参照元 GetOrientation(), GetRotation(), SetOrientation(), と SetRotation(). |
|
|
位置姿勢を表すフレーム.普通はWorldの直下のフレームを指定する. 同じ階層のフレームでなければならない. このフレームには,スケーリングを加えてはならない. 参照元 GetCenterPosition(), GetFrame(), SetCenterPosition(), SetFrame(), SetOrientation(), と SetRotation(). |
|
|
積分方式
|
|
|
クラス名の取得などの基本機能の実装
Spr::SGObjectを再定義しています。 |
 1.4.1
1.4.1