|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
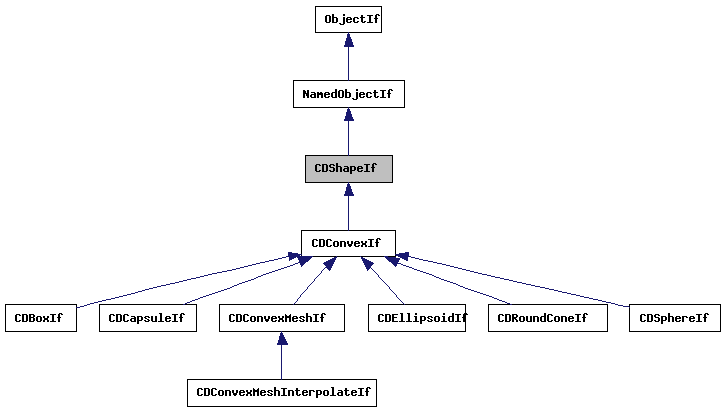
形状の基本クラス
#include <SprCDShape.h>
Public メソッド | |
| SPR_IFDEF (CDShape) | |
| void | SetStaticFriction (float mu0) |
| 静止摩擦係数の設定 | |
| float | GetStaticFriction () |
| 静止摩擦係数の取得 | |
| void | SetDynamicFriction (float mu) |
| 動摩擦係数の設定 | |
| float | GetDynamicFriction () |
| 動摩擦係数の取得 | |
| void | SetElasticity (float e) |
| 反発係数(はねかえり係数)の設定 | |
| float | GetElasticity () |
| 反発係数(はねかえり係数)の取得 | |
| void | SetDensity (float d) |
| 密度の設定 | |
| float | GetDensity () |
| 密度の取得 | |
| void | SetContactSpring (float K) |
| 静接触の弾性の設定 | |
| float | GetContactSpring () |
| 静接触の弾性の取得 | |
| void | SetContactDamper (float D) |
| 静接触の粘性の設定 | |
| float | GetContactDamper () |
| 静接触の粘性の取得 | |
| void | SetReflexSpring (float K) |
| 跳ね返りバネ係数の設定 | |
| float | GetReflexSpring () |
| 跳ね返りバネ係数の取得 | |
| void | SetReflexDamper (float D) |
| 跳ね返りダンパ係数の設定 | |
| float | GetReflexDamper () |
| 跳ね返りダンパ係数の取得 | |
| void | SetFrictionSpring (float K) |
| 摩擦バネ係数の設定 | |
| float | GetFrictionSpring () |
| 摩擦バネ係数の取得 | |
| void | SetFrictionDamper (float D) |
| 摩擦ダンパ係数の設定 | |
| float | GetFrictionDamper () |
| 摩擦ダンパ係数の取得 | |
| void | SetVibration (float vibA, float vibB, float vibW) |
| void | SetVibA (float vibA) |
| float | GetVibA () |
| void | SetVibB (float vibB) |
| float | GetVibB () |
| void | SetVibW (float vibW) |
| float | GetVibW () |
| void | SetVibT (float vibT) |
| float | GetVibT () |
| void | SetVibContact (bool vibContact) |
| bool | GetVibContact () |
| const PHMaterial & | GetMaterial () |
| 物性をまとめて取得 | |
| void | SetMaterial (const PHMaterial &mat) |
| 物性をまとめて設定 | |
| float | CalcVolume () |
| 幾何計算 [詳細] | |
| Vec3f | CalcCenterOfMass () |
| 質量中心を計算 [詳細] | |
| Matrix3f | CalcMomentOfInertia () |
| 慣性モーメントを計算 [詳細] | |
| bool | IsInside (const Vec3f &p) |
| 点との交差判定 [詳細] | |
| void | CalcBBox (Vec3f &bbmin, Vec3f &bbmax, const Posed &pose=Posed()) |
| bounding boxを計算 [詳細] | |
 Public メソッド inherited from NamedObjectIf Public メソッド inherited from NamedObjectIf | |
| SPR_IFDEF (NamedObject) | |
| const char * | GetName () const |
| 名前の取得 | |
| void | SetName (const char *n) |
| 名前の設定 | |
| NameManagerIf * | GetNameManager () |
| 名前管理オブジェクトの取得 | |
| Public メソッド inherited from ObjectIf | |
| SPR_IFDEF (Object) | |
| ObjectIf * | GetObjectIf () |
| const ObjectIf * | GetObjectIf () const |
| int | DelRef () const |
| void | Print (std::ostream &os) const |
| デバッグ用の表示。子オブジェクトを含む。 | |
| void | PrintShort (std::ostream &os) const |
| デバッグ用の表示。子オブジェクトを含まない。 | |
| void | DumpObjectR (std::ostream &os, int level=0) const |
| オブジェクトツリーのメモリイメージをダンプ | |
| int | AddRef () |
| int | RefCount () |
| size_t | NChildObject () const |
| 子オブジェクトの数 | |
| ObjectIf * | GetChildObject (size_t pos) |
| 子オブジェクトの取得 | |
| const ObjectIf * | GetChildObject (size_t pos) const |
| bool | AddChildObject (ObjectIf *o) |
| 子オブジェクトの追加.複数のオブジェクトの子オブジェクトとして追加してよい. 例えば,GRFrameはツリーを作るが,全ノードがGRSceneの子でもある. | |
| bool | DelChildObject (ObjectIf *o) |
| 子オブジェクトの削除 | |
| void | Clear () |
| すべての子オブジェクトの削除と、プロパティのクリア | |
| ObjectIf * | CreateObject (const IfInfo *info, const void *desc) |
| オブジェクトを作成し,AddChildObject()を呼ぶ. | |
| template<class T > | |
| ObjectIf * | CreateObject (const T &desc) |
| CreateObjectを呼び出すユーティリティ関数 | |
| const void * | GetDescAddress () const |
| デスクリプタの読み出し(参照版 NULLを返すこともある). これが実装されていなくても,ObjectIf::GetDesc()は実装されていることが多い. | |
| bool | GetDesc (void *desc) const |
| デスクリプタの読み出し(コピー版 失敗する(falseを返す)こともある). ObjectIf::GetDescAddress() が実装されていなくても,こちらは実装されていることがある. | |
| void | SetDesc (const void *desc) |
| デスクリプタの設定 | |
| size_t | GetDescSize () const |
| デスクリプタのサイズ | |
| const void * | GetStateAddress () const |
| 状態の読み出し(参照版 NULLを返すこともある). これが実装されていなくても,ObjectIf::GetState()は実装されていることがある. | |
| bool | GetState (void *state) const |
| 状態の読み出し(コピー版 失敗する(falseを返す)こともある). ObjectIf::GetStateAddress() が実装されていなくても,こちらは実装されていることがある. | |
| void | SetState (const void *state) |
| 状態の設定 | |
| bool | WriteStateR (std::ostream &fout) |
| 状態の書き出し | |
| bool | WriteState (std::string fileName) |
| bool | ReadStateR (std::istream &fin) |
| 状態の読み込み | |
| bool | ReadState (std::string fileName) |
| size_t | GetStateSize () const |
| 状態のサイズ | |
| void | ConstructState (void *m) const |
| メモリブロックを状態型に初期化 | |
| void | DestructState (void *m) const |
| 状態型をメモリブロックに戻す | |
| bbmin | bounding boxの下限 |
| bbmax | bounding boxの上限 |
| pose | bounding boxを定義する座標変換 形状の位置と向きがposeで与えられたときの,その座標系に関するaxis-aligned bounding box (AABB)を計算する. |
| Vec3f CalcCenterOfMass | ( | ) |
| Matrix3f CalcMomentOfInertia | ( | ) |
| float CalcVolume | ( | ) |
| bool IsInside | ( | const Vec3f & | p | ) |
| p | 判定点 |
 1.8.5
1.8.5