|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
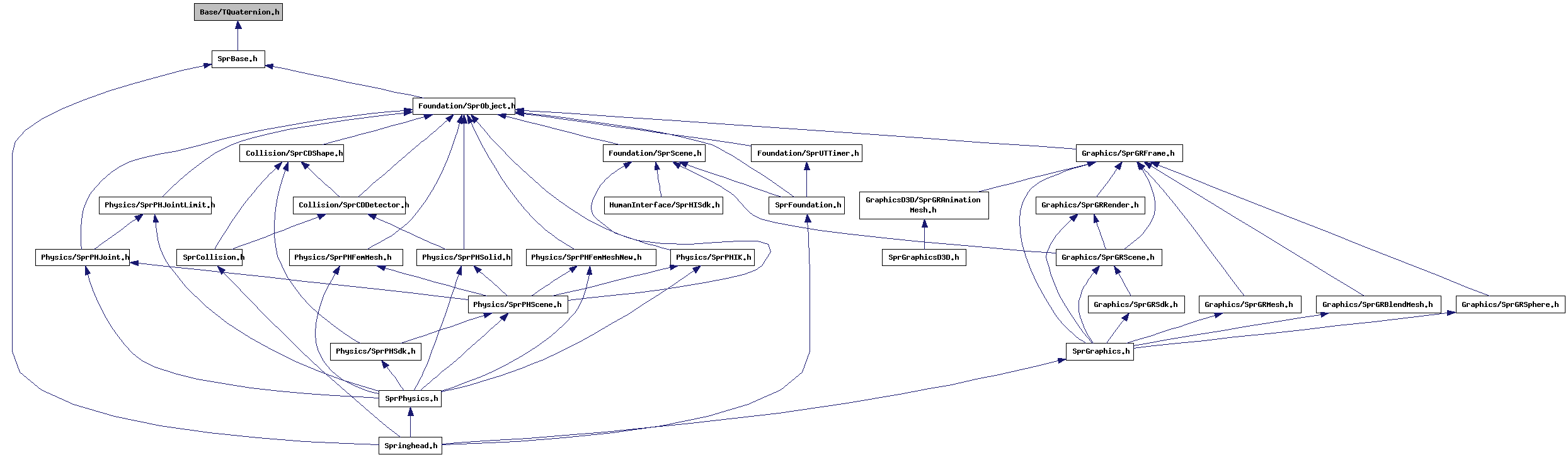
クォータニオンクラスの定義 [詳細]

構成 | |
| class | TQuaternion< ET > |
| Quaternion/4元数.3x3行列の代わりに回転を表すために使える. 4変数で済む.補間や微分・積分がやりやすい. TVec3との掛け算は,回転変換でオーバーロードされている. [詳細] | |
| class | TPose< ET > |
| 姿勢.位置と向きを表すクラス. TQuaternion と TVec3 で向きと位置を表す. TAffineの代わりに使える. [詳細] | |
| struct | SwingTwist |
| 回転のスイング・ツイスト角表現 [詳細] | |
ネームスペース | |
| Spr | |
| SpatialVector V(v, w) = [v; w]; SpatialTransform X(R, r) = [R^T, -R^T * r%; O, R^T]; ^Tは転置, は外積行列,Oは零行列. X(R, r) * V(v, w) = [R^T * (v + w % r); R^T * w];. | |
型定義 | |
| typedef TQuaternion< float > | Quaternionf |
| float版TQuaternion. | |
| typedef TQuaternion< double > | Quaterniond |
| double版TQuaternion. | |
| typedef TPose< float > | Posef |
| float版TPose. | |
| typedef TPose< double > | Posed |
| double版TPose. | |
関数 | |
| template<class A , class B > | |
| TQuaternion< A > | operator* (const TQuaternion< A > &q1, const TQuaternion< B > &q2) |
| TQuaternion 同士の掛け算.回転変換としては,合成になる. | |
| template<class ET , class BD > | |
| TYPENAME BD::ret_type | operator* (const TQuaternion< ET > &q, const PTM::TVectorBase< 3, BD > &v) |
| TQuaternionでベクトルを回転. Quaternion * vector * Quaternion^{*} と同じ. | |
| template<class ET , class BD > | |
| TYPENAME BD::ret_type | operator* (const TQuaternion< ET > &q, const PTM::TMatrixBase< 3, 3, BD > &m) |
| TQuaternionで行列を回転. TQuaternion * (ex,ey,ez) * TQuaternion.conjugated() と同じ. | |
| template<class T1 , class T2 > | |
| T1 | dot (const TQuaternion< T1 > &q1, const TQuaternion< T2 > &q2) |
| TQuaternion の内積. | |
| template<class ET , class BD > | |
| TQuaternion< ET > | mult (const TQuaternion< ET > &q, const PTM::TVectorBase< 3, BD > &v) |
| 回転操作をせず,普通にQuaternionとベクトルの積を求める | |
| template<class BD , class ET > | |
| TQuaternion< ET > | mult (const PTM::TVectorBase< 3, BD > &v, const TQuaternion< ET > &q) |
| 回転操作をせず,普通にベクトルとQuaternionの積を求める | |
| template<class T1 , class T2 > | |
| TQuaternion< T1 > | interpolate (T1 t, const TQuaternion< T1 > &q1, const TQuaternion< T2 > &q2) |
| template<class EP , class EV > | |
| TVec3< EV > | operator* (const TPose< EP > &p, const TVec3< EV > &v) |
| template<class EA , class EB > | |
| TPose< EA > | operator* (const TPose< EA > &a, const TPose< EB > &b) |
| template<class EA , class EB > | |
| TPose< EA > | interpolate (EA t, const TPose< EA > &p0, const TPose< EB > &p1) |
| Poseの補間 | |
 1.8.5
1.8.5