|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
|
Springhead
An open source physics engine for virtual reality, haptics and motion generation.
|
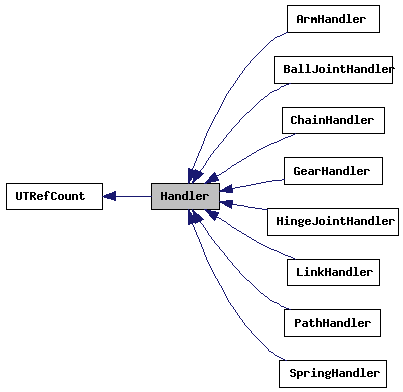
シーンの構築とインタラクションの基本クラス
#include <Handler.h>
Public 型 | |
| enum | { MENU_CHAIN = SampleApp::MENU_SCENE, MENU_SPRING, MENU_LINK, MENU_ARM, MENU_GEAR } |
Public メソッド | |
| Handler (SampleApp *a) | |
| FWSdkIf * | GetFWSdk () |
| PHSdkIf * | GetPHSdk () |
| FWSceneIf * | GetFWScene () |
| PHSceneIf * | GetPHScene () |
| virtual void | BuildScene () |
| virtual void | OnAction (int id) |
| virtual void | OnStep () |
| virtual void | OnDraw (GRRenderIf *render) |
 Public メソッド inherited from UTRefCount Public メソッド inherited from UTRefCount | |
| UTRefCount (const UTRefCount &r) | |
| UTRefCount & | operator= (const UTRefCount &r) |
| int | AddRef () const |
| int | DelRef () const |
| int | RefCount () const |
Public 変数 | |
| PHSolidDesc | sdFloor |
| 床剛体のディスクリプタ | |
| PHSolidDesc | sdBox |
| 箱剛体のディスクリプタ | |
| PHSolidIf * | soFloor |
| 床剛体のインタフェース | |
| std::vector< PHSolidIf * > | soBox |
| 箱剛体のインタフェース | |
| std::vector< PHJointIf * > | jntLink |
| 関節のインタフェース | |
| std::vector< PHTreeNodeIf * > | nodeTree |
| ABA(関節座標シミュレーション)のためのツリーノード | |
| SampleApp * | app |
 1.8.5
1.8.5