#include <PHJoint.h>
Spr::UTTreeNode< PHJointBase >, と Spr::SGObjectを継承しています。
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, Spr::PHJointMulti< 3 >, と Spr::PHJointRootに継承されています。
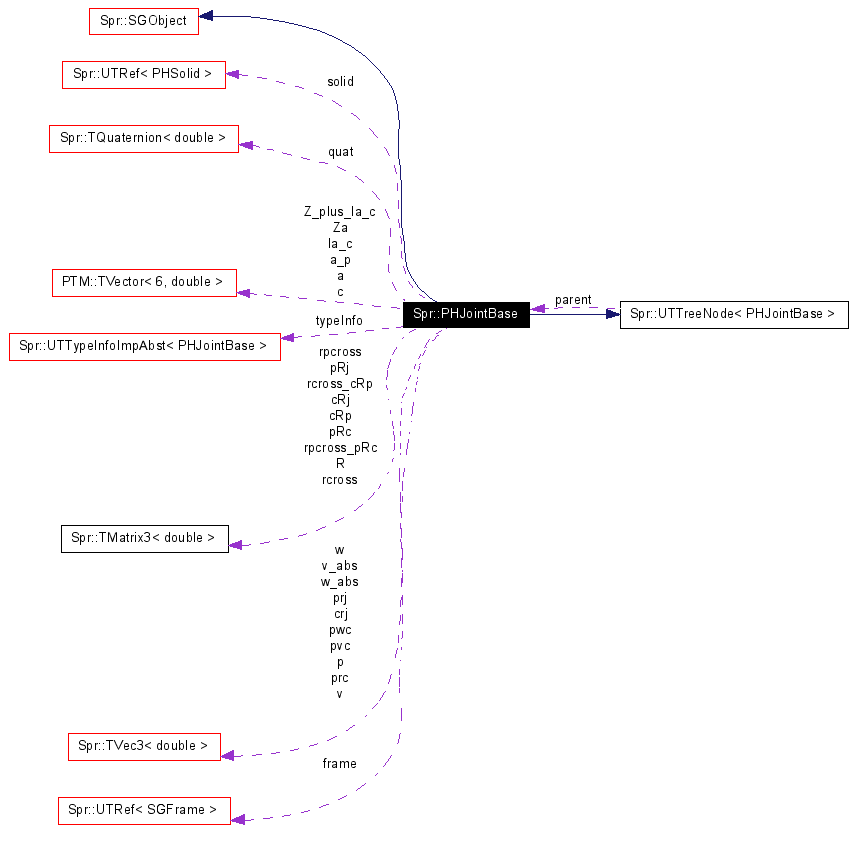
Spr::PHJointBaseのコラボレーション図
Fc := child solid's frame 子剛体の座標系
|
|
積分の方法. Method of solver
|
|
|
コンストラクタ
|
|
|
ロード後の初期化.再帰.
Spr::SGObjectを再定義しています。 Spr::PHJointHinge, Spr::PHJointSlider, と Spr::PHJointBallで再定義されています。 |
|
|
指定したPHSolidを小に持つノードを検索する
|
|
|
親剛体のフレームから見た関節姿勢
|
|
|
子剛体のフレームから見た関節姿勢
|
|
|
子剛体の角加速度(World系)
|
|
|
子剛体の加速度(World系)
|
|
|
子剛体の角加速度(World系)
参照先 w_abs. |
|
|
子剛体の加速度(World系)
参照先 v_abs. |
|
|
絶対座標での関節の向き
参照先 R. |
|
|
関節の自由度
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
|
関節位置の取得
Spr::PHJoint1D, Spr::PHJointBall, と Spr::PHJointUniversalで実装されています. |
|
|
関節速度の取得
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
|
関節加速度の取得
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
|
関節トルクの取得
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
||||||||||||
|
関節トルクの設定
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
||||||||||||
|
関節トルクを加える
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
|
コリオリの力による加速度の計算
|
|
|
articulated inertia & ZA-force
Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で再定義されています。 |
|
|
積分
Spr::PHJoint1D, Spr::PHJointBall, と Spr::PHJointUniversalで再定義されています。 |
|
|
このノードの加速度を計算したい場合に呼ぶ. 親ノードの加速度は副作用で求まる.子ノードについては計算しない. 呼び出しかた. 1. root->CalcCoriolisAccelRecusive(dt); 2. 全ジョイントについて,PHJointBase::torque に値を直接代入する. 3. root->CalcArticulatedInertia(dt); 4. CalcAccel(dt) 5. ジョイントの a から加速度を読み出す(座標系に注意) 6. 2-5をトルクパターンを変えながら呼び出す. Compute accelaration of the child solid of this joint. For partial use of Featherstone's algorithm. Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で実装されています. |
|
|
所有しているオブジェクトの数
Spr::SGObjectを再定義しています。 |
|
|
所有しているオブジェクト
Spr::SGObjectを再定義しています。 |
|
|
参照しているオブジェクトの数
Spr::SGObjectを再定義しています。 |
|
|
参照しているオブジェクト
Spr::SGObjectを再定義しています。 |
|
||||||||||||
|
子オブジェクトの追加
Spr::SGObjectを再定義しています。 |
|
||||||||||||
|
子オブジェクトの削除
Spr::SGObjectを再定義しています。 |
|
|
子になりえるオブジェクトの型情報の配列
Spr::SGObjectを再定義しています。 |
|
||||||||||
|
派生クラスが基本クラス型オブジェクトのメンバにアクセスするための手段
参照先 Spr::UTTreeNode< PHJointBase >::GetParent(). 参照元 Spr::PHJointMulti< 3 >::CalcAccel(), Spr::PHJointMulti< 3 >::CompArticulatedInertia(), と Spr::PHJointMulti< 3 >::PreIntegrate(). |
|
|
位置・速度の伝播(非再帰関数)
|
|
|
姿勢などの再設定 非再帰 基本的な状態量(PHJointStateの内容)がLoadedやLoadStateでセットされた後に、 従属変数を計算するための関数 Spr::PHJoint1D, Spr::PHJointMulti< NDOF >, Spr::PHJointMulti< 2 >, と Spr::PHJointMulti< 3 >で再定義されています。 |
|
|
クラス名の取得などの基本機能の実装
Spr::SGObjectを再定義しています。 Spr::PHJoint1D, Spr::PHJointHinge, Spr::PHJointSlider, Spr::PHJointBall, と Spr::PHJointUniversalで再定義されています。 |
|
|
積分の方法. Method of solver
|
|
|
子Solid.関節は親Solidと子Solidをつなぐ
|
|
|
ルートノードが固定の場合のFrame
|
|
|
3x3回転行列 rotation matrix(Fp to Fjp, Fc to Fjc)
|
|
|
並進ベクトル radius vector(Fp to Fjp in Fp, Fc to Fjc in Fc)
|
|
|
並進ベクトル radius vector(Fp to Fc in Fc)
|
|
|
3x3回転行列 rotation matrix(Fp to Fc, Fc to Fp)
|
|
|
orientation matrix
参照元 GetOrientation(). |
|
|
orientation quaternion
|
|
|
position vector
|
|
|
velocity in Fc/world coord.
参照元 GetSolidVelocity(). |
|
|
angular velocity in Fc/world coord.
|
|
|
[angular]velocity relative to Fp in Fc coord.
|
|
|
spatial isolated inertia
|
|
|
spatial articulated inertia
|
|
|
zero accelaration force in Fc coord.
|
|
|
Coriolis vector in Fc coord.
|
|
|
spatial accelaration in Fc coord.
|
 1.4.1
1.4.1